Half_456
Usuario (Argentina)
La demostración pública de su novedoso reactor nuclear, un logro que se consideraba casi imposible, suscita la sospechas de parte de la comunidad científica link: http://www.youtube.com/watch?v=u-Ru1eAymvE Dos científicos italianos de la Universidad de Bolonia realizaron el viernes la demostración pública de un reactor nucelar de fusión que funciona a temperatura ambiente y que puede producir hasta 31 veces más energía de la que consume. Andrea Rossi y Sergio Focardi aseguraron que su invento ya se encuentra en fase comercial, que han firmado contratos con importantes empresas y que comenzarán a fabricarlo masivamente a finales de este mismo año. "Ya hemos superado la fase de tener que convencer a alguien -dijo Rossi-. La competición ahora está en el mercado". Pocas áreas científicas han suscitado más controversias que la fusión fría, la hipotética reacción nuclear a temperatura ambiente en la que dos núcleos atómicos se unen para formar uno mayor mientras liberan una gran cantidad de energía. En la década de los 80, Stanley Pons y Martin Fleishmann anunciaron al mundo que habían conseguido la fusión fría, lo que suponía una fuente de energía inagotable y barata, al alcance de todos. Pero su experimento no pudo ser reproducido por otros laboratorios. Desde entonces y hasta ahora, se han realizado varios anuncios más, aunque ninguno de ellos ha sido legitimado. Es más, varios estudios parecen demostrar que la fusión fría es teóricamente improbable, lo que ha ido apartando de ese campo de estudio a la mayoría de los científicos. Sin embargo, y a pesar del escepticismo reinante, una pequeña comunidad de investigadores sigue trabajando en las reacciones de fusión a temperatura ambiente. Y las últimas noticias al respecto se produjeron la semana pasada, cuando los italianos Andrea Rossi y Sergio Focardi, ambos de la Universidad de Bolonia, anunciaron haber fabricado un reactor de fusión fría capaz de producir 12.400 watios de energía calórica con una inversión previa de sólo 400 watios. Menos de un céntimo por kilowatio El pasado viernes, los investigadores realizaron una demostración, durante una rueda de prensa en Bolonia, de su ingenio, al que llaman reactor de fusión niquel-hidrógeno. Y lo que es más, anunciaron que empezarán a comercializar su invento durante los próximos tres meses, y que comenzarán a producirlo masivamente hacia finales de este mismo año. Según explicaron Rossi y Focardi, cuando los núcleos de niquel e hidrógeno se fusionan en el interior de su reactor, la reacción produce cobre y una gran cantidad de energía. El reactor utiliza menos de un gramo de hidrógeno y su arranque requiere unos 1.000 watios de electricidad, que se reduce a 400 watios en cuestión de minutos. Por cada minuto de funcionamiento, la reacción consigue convertir 292 gramos de agua a 20 grados en vapor seco a más de 100 grados de temperatura. Y dado que elevar en 80 grados la temperatura del agua requiere cerca de 12.400 watios de energía, calcularon que el experimento produjo 31 veces más energía que la utilizada para llevarla a cabo (12.400/400 = 31). Con estas premisas, Rossi y Focardi estimaron que se podría generar electricidad a un coste inferior a un céntimo por kilowatio, una cantidad muy inferior a la que se consigue con los métodos actuales. Durante el tiempo en que el reactor estuvo funcionando, Rossi y Focardi demostraron que se estaba produciendo una pequeña cantidad de radiación gamma, lo que indica que en el interior del ingenio, efectivamente, estaba teniendo lugar una reacción nuclear. Vamos, que no había trampa ni cartón. En su inminente versión comercial, dijeron, los reactores tendrán limitada su capacidad y producirán "solo" ocho veces más energía de la que utilizan, para garantizar la seguridad en todo momento. El proceso, además, no libera radiación fuera del reactor, y no produce residuo nuclear alguno. Los reactores, por último, son modulares y pueden alinearse, en serie o en paralelo, para alcanzar prácticamente cualquier potencia que se desee. Según aseguraron, actualmente están construyendo una planta de un megawatio con 125 módulos como el utilizado durante la demostración. Los científicos dijeron también que uno de sus reactores lleva trabajando continuamente desde hace ya dos años, suministrando energía a una pequeña fábrica, aunque no quisieron dar más detalles al respecto. Desconfianza A pesar de todo, el artículo científico de Rossi y Focardi sobre su reactor nuclear ha sido rechazado por varias publicaciones científicas. Lo que no les ha impedido publicarlo en The Journal of Nuclear Physics, una revista online fundada y mantenida por ellos mismos. Un hecho que no ha hecho más que aumentar la desconfianza hacia ellos y sus supuestos logros. En su artículo, en efecto, se dan muy pocos detalles sobre la forma en que el reactor funciona. Los mismos científicos aseguran desconocer los detalles que subyacen al proceso de fusión, y consideran que se necesitan más estudios, aunque eso, aseguran, no cambia el hecho de que su invento funciona. Durante la rueda de prensa, ambos aseguraron que disponen ya de jugosos contratos comerciales y que han preferido no revelar demasiados detalles porque están bajo secreto de patente. "Ya hemos superado la fase de tener que convencer a alguien -dijo Rossi-. Y hemos llegado a un producto que está listo para salir al mercado. Nuestro juez será el mercado mismo. Y en este terreno, la fase de competición en el campo de las teorías, las hipótesis, las conjeturas, etc, etc, está más que superada. La competición está en el mercado. Si alguien tiene una tecnología válida, ese alguien no tiene que convencer a la gente a base de charlas, tiene que construir un reactor que funcione y salir a venderlo, como nosotros estamos haciendo". http://www.abc.es/20110125/ciencia/abci-cientificos-aseguran-haber-conseguido-201101250938.html
La mujer con la que duermes y que te besa y te adora dice que te quiere. Y tú le crees. Puedes decirlo por la forma cómo te mira, por cómo te abraza, por la forma en que siempre parece saber las cosas que quieres antes que tú las digas. Hay algunas cosas en tu vida que conoces, y el amor y esta mujer desnuda son dos de ellas. Pero hay varias que no sabes. Una mujer puede darte su cuerpo y su corazón, pero hay cosas que ella nunca te dirá. Cosas que mantiene en lo más profundo de sí. Misterios de los que sólo han indicios por una sonrisita circunstancial o una risa inescrutable. Profundos secretos que no te incluyen – ni te incluirán jamás. Aquí están algunos de ellos. Pero como cualquier hombre que busca, estate preparado para lo que vas a encontrar... 1. Su mejor amiga sabe todo. Esa chica sabe todo acerca de tí, desde el tamaño de tu cuenta bancaria hasta el tamaño de otras cosas aún más privadas, y cómo se comparan con las de otros hombres con las que ha estado tu novia, su amiga. Ha realizado comparaciones desde muy cerca, por lo que puede hablar de éstas con un alto nivel de seguridad. Cuando su amiga te mira y sonríe con cierto aire de suficiencia o de satisfacción, ni lo imaginas. Lo sabe. Ahora sabes que ella sabe, así que manéjalo con calma: la situación no va a cambiar. Pregunta a la amiga acerca de tu novia, o conversa con ella de tu relación bajo tu propio riesgo. Ella se lo dirá. Con mayor razón si te jura no hacerlo. Esto no siempre es malo; por ejemplo, si le cuentas cuánto quieres a tu novia. Pero, en general, recuerda que es su confidente primero, nunca tuya. 2. Sólo el mirar tus manos puede encenderla. 3. Cuando te vas, aunque sea por un día, ella duerme con tu vieja camiseta favorita sólo porque huele como tú. 4. Nunca te dirá exactamente con cuántos hombres se ha acostado. No importa cuán sincera parezca cuando responda tu pregunta. Como un principio no científico, podemos afirmar que cuando una mujer dice que ha dormido con cuatro hombres, el número real está cerca a siete. Su mentirita es parcialmente intencional (no quiere parecer promiscua), pero la mayor parte es amnesia sexual. Cuando una mujer quiere pretender que un encuentro nunca ocurrió, simplemente borra al hombre de su hoja de puntajes oficial. Las excusas comunes que ocultan una omisión: “fue sólo unos momentos” o “estaba borracho”. 5. Ha fantaseado acerca de estar contigo al menos una docena de veces antes de su primera vez juntos. 6. Todavía piensa en sus ex y los compara contigo. La mayoría de veces ganas. A veces no. 7. Te ha buscado en Google. 8. Cuando se está enamorando de tí, pierde el apetito. 9. Su cuerpo no es naturalmente húmedo y libre de vello. Pero nunca te dejará ver nada que esté relacionado a la depilación, a las pinzas, a la cera, a la exfoliación y a la humectación que permite que ella sea así. 10. Sólo parece ser muy ordenada. Su verdadera organización (o desorganización) se revela en su clóset, su bolso de maquillaje y sus archivos de trabajo. 11. Ella sabe que te gusta el porno y qué página web de mujeres visitas a menudo. Le dan risa las cosas que te excitan. 12. Cuando dice “estoy lista”, necesita exactamente siete minutos más para estar lista. No trates de engañar al sistema bañándote siete minutos más tarde; necesitará los siete minutos de todas maneras. 13. Cuando dice “te veo en 15 minutos” significa que saldrá en 15 minutos, lo que quiere decir que llegará en 30 o tal vez 40 minutos. 14. La has hecho llorar más veces de las que puedes pensar. 15. Está obsesionada acerca de cuándo la vas a volver a llamar. El período de tiempo entre su primera cita y su “Gracias, fue una noche grandiosa. ¿Cuándo te puedo volver a ver?” siempre parece que fuera para ellas en cámara lenta. No te preocupes entonces en parecer muy entusiasta. Llama. Aunque sólo esperes hasta el mediodía del día siguiente, se sentirá como toda una vida para ella. Y no le envíes un correo a menos que quieras que te ponga en la papelera de reciclaje junto con tu mensaje. 16. Quiere que le hables un poquito sucio. 17. Al comienzo de su relación, guarda todos tus mensajes de voz y los escucha (y hace que sus amigas los escuchen, también) repetidamente. 18. Puede vestir ropa interior de abuela y no depilarse las piernas a propósito porque le gustas. Suena loco, pero mientras más le gustas, menos propensa está a acostarse contigo pronto, porque no quiere sabotear nada saltando etapas. Así que se pone a propósito ropa interior horrible y no depila sus piernas para prevenirse a sí misma de estar desnuda contigo demasiado pronto. A veces puede estar un poco alegre o dejarse llevar y el plan fracasa. 19. Ella divide el costo de sus compras de ropa y accesorios en dos o más tarjetas de crédito, para que no te des cuenta del déficit en el que está. 20. Está constantemente probándote. Ella observa, analiza y juzga cada acción, palabra, gesto, postura, correo electrónico y expresión facial. Cuando te pregunta si te gustaría hacer un trío, no quiere decir que ella quiera. Si quieres que todo salga bien, tu respuesta debería ser “¿Por qué querría dormir con otra mujer cuando te tengo a tí?”. 21. Ella ve tu trasero cada vez que sales del cuarto. 22. Ella necesita constantes indicios de que la quieres cerca. Es por eso que es mejor, por ejemplo, decir “Me gustaría que vengas conmigo de viaje este fin de semana. ¿Puedes?” que preguntar “¿Qué vas a hacer este fin de semana?”. 23. Le encanta cuando te pones un poco celoso. Así que si la ves flirteando en frente tuyo con alguien en alguna fiesta, realmente lo está haciendo contigo – a través de él. 24. Aunque se queje de que no te ve lo suficiente (o que trabajas demasiado duro), ella no encuentra nada más sexy que mirarte con el traje puesto en la mañana yendo al trabajo. 25. Ella comienza las peleas contigo porque se siente ignorada. Trata de hacer que las emociones salgan de tí. No te metas en tu cueva; sólo dale algo de lo que quiere: algo de atención. Y nunca le digas que se calme, a menos que quieras asegurarte que no lo haga. 26. Aún si ella insiste en pagar la cuenta en la primera cita, pensará que eres un tacaño si la dejas. 27. Puede encontrar repulsivo a tu mejor amigo, pero ha fantaseado en dormir con él. No porque lo desee, sino porque quiere un poco de alguien que está cerca a tí. 28. Si va a romper contigo, todas sus amigas lo sabrán antes que tú. Ha estado hablando de eso al menos durante las dos semanas previas. 29. Cuando rompen, ella pone todas tus fotografías y los recuerdos de tu relación en una caja de zapatos y los guarda en su clóset. Sólo para el caso de que se ponga nostálgica. Sólo para el caso que regreses. 30. Ella quiere que tomes el control en la cama. Sí, tiene una carrera exitosa, es financieramente independiente, vive sola y no necesita un hombre que la haga feliz (en teoría). Pero quiere que la levantes, que la lleves a la cama y la tomes sin preguntar.
hola amigos hoy les traigo este post El ahora ex actor de "Two and a Half Men" demandó al estudio Warner y al productor ejecutivo del programa, Chuck Lorre, por su despido. 1Los Ángeles (EEUU - EFE).- El actor Charlie Sheen presentó este jueves una demanda en la Corte Superior de Los Ángeles por 100 millones de dólares contra el estudio Warner Bros. y el productor ejecutivo de "Two and a Half Men", Chuck Lorre, por su despido como protagonista de la serie. Según los documentos judiciales, publicados por la prensa local, en la demanda el intérprete reclama además los daños punitivos por la suspensión de la producción la serie, su cancelación y pérdida del salario estipulado. La demanda también reclama que se recompense al resto del reparto y del equipo de producción "por el balance de los 24 episodios de la temporada". El estudio decidió primero suspender la producción de "Two and a Half Men" debido a los problemas con el alcohol y las drogas de Sheen cuando aún restaban ocho episodios por grabar (de los que se acordaron filmar al menos cuatro); después canceló el rodaje de la actual temporada y finalmente despidió al actor. La demanda interpuesta por Sheen llega tres días después de su despido oficial. Warner argumentó que el intérprete se comportaba de forma "autodestructiva y parecía estar muy enfermo" y explicó que sus insultos a ejecutivos de la compañía demostraban su "depravación moral". La demanda incluye alegaciones que afirman que Warner y Lorre decidieron suspender la serie antes de que Sheen insultara gravemente en público al productor ejecutivo del show. Según se detalla en el texto, Lorre no tenía guiones preparados para el rodaje cuando Sheen aseguraba estar preparado para regresar al trabajo tras su ingreso en una clínica de desintoxicación. Sheen, el actor mejor pagado de la televisión de EE.UU.,llamó a Lorre "charlatán que eligió no hacer su trabajo", "un pedazo de mierda" y "un estúpido pequeño hombre". Tal y como ocurriera cuando se anunció la cancelación de "Two and a Half Men", el estudio no especificó que la salida de Sheen fuera a suponer el final definitivo de la serie, con lo que dejó la puerta abierta a continuar la producción con un sustituto. Sheen, protagonista en los medios estadounidenses en las últimas semanas con sus polémicas declaraciones, también se ha ganado la enemistad de El Salvador, tras asegurar: "Antes me iría al jodido El Salvador a vender zapatos antes que verme las caras en un juicio con mi ex", según la web RadarOnline.com. Estas palabras han tenido gran repercusión en el país e incluso ha obligado a su Ministerio de Relaciones Exteriores a pronunciarse en un comunicado que "rechaza las declaraciones que medios internacionales atribuyen al actor estadounidense Charlie Sheen, en las que se menciona de manera desafortunada e irrespetuosa" el nombre de El Salvador. "Por lo tanto, esperamos que dichas declaraciones sean rectificadas a la mayor brevedad posible", añadió. EFE bueno eso fue todo espero que les aya gustado
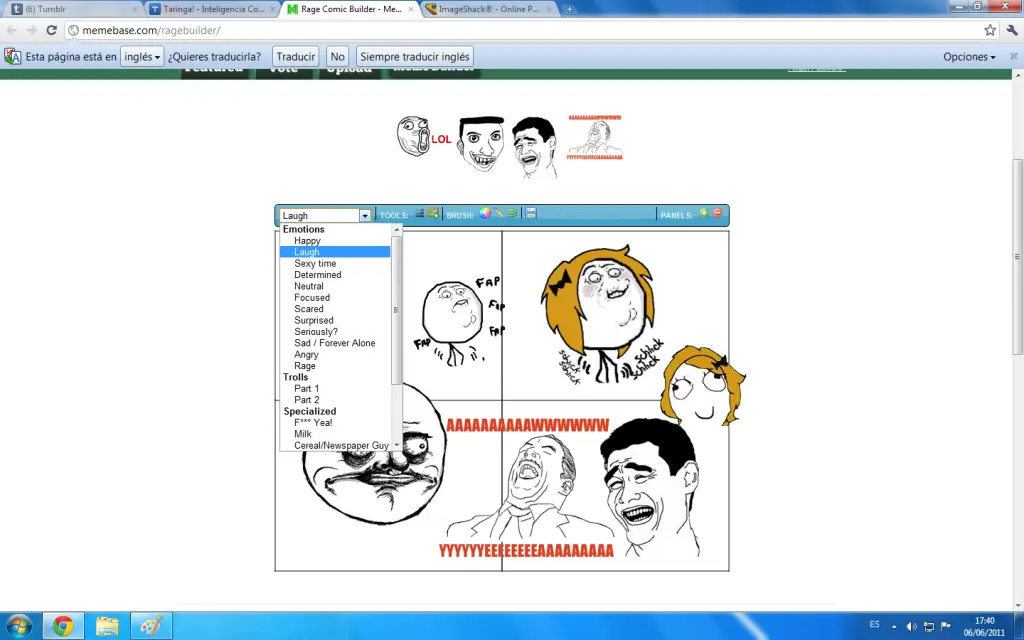
Bueno primero lo primero es ir a http://memebase.com/ragebuilder/ y empezar a crear... bueno primero vas a la pagina que te deje hay... luego seleccionas los meme's que quieras para crear tu comic y los pones donde tu quieras... puedo movilizarlos atraves de los paneles escribirles tus textos... con las herramientas... Tambien veras que hay diferentes secciones de meme's y una gran variedad de la cual podras elegir... tambien podras agregar imagenes que no sean meme's para completar tu comic ajustar los memes y imagenes...

Como Hacer un Cable de Red Normal y Cruzado En el mercado existen cables de red de varias medidas ya hechos, pero en ocasiones necesitamos hacerlo nosotros, bien porque no haya la medida que necesitamos o bien porque necesitemos pasarlo a través de paredes y tubos. Vamos a ver los diferentes componentes que necesitaremos para hacernos nuestro cable de red. Es el cable que se utiliza para conexiones de red. Puede ser de varios tipos y categorías, siendo el mas empleado el de categoría 5 (C5), a ser posible blindado. Tiene en su interior 4 pares de cables trenzados y diferenciados por colores (blanco naranja, naranja, blanco verde, verde, blanco azul, azul y blanco marrón y marrón). Lo podemos comprar por metros o en bobinas de 100 y 300 metros. Es importante recordar que la longitud máxima de un cable de red no debe exceder de los 90 metros. Vamos a numerar los hilos: 1 Blanco – Naranja 2 Naranja 3 Blanco – verde 4 Verde 5 Blanco – Azul 6 Azul 7 Blanco – Marrón 8 Marrón El orden estándar de colocación de los hilos, siempre con la pestaña del conector hacia abajo, seria: Estándar 568-B: 1-2-3-5-6-4-7-8, correspondiendo estos números al orden indicado en cable de red. Es importante mantener este orden porque si necesitamos que en uno de los extremos vaya una roseta pared RJ45 en vez de un terminal RJ45, estas rosetas vienen señaladas siguiendo este orden. TERMINALES RJ45 Imagen de terminales RJ45. El superior es normal y el inferior es blindado. Varios tipos de protectores de terminales. Imagen de roseta de pared para dos salidas RJ45 Es un terminal similar a los de conexión telefónica (RJ11), pero de 11 mm de longitud por 7 mm de grosor, con 8 hilos en vez de 4 ó 6 de los terminales de teléfono. Aunque tanto los terminales RJ45 como los cables de red tienen 8 hilos, para las funciones de red solo se utilizan los pares 1 – 2 y 3 – 6. Los terminales RJ45 pueden ser blindados o sin blindar. Para longitudes mayores de 10 metros es aconsejable utilizar los blindados. También venden protectores para los terminales, que darán un mejor aspecto a nuestro trabajo y además, si tenemos varios cables, nos ayudaran a identificarlos. También podemos poner en uno de los extremos una roseta RJ45. Estas rosetas pueden ser de muy diferentes tipos (empotrables, de superficie, con un terminal o con varios). Para un correcto funcionamiento, en el caso de que pongamos una roseta con varios conectores deberemos tirar un cable para cada conector. BUENO ESO FUE TODO ESPERO QUE LES AYA GUSTADO M DESPIDO
INTRODUCCIÓN: Por inquietud de un amigo me propuse realizar un robot, ya que comencé a interesarme por el mundo de los microcontroladores de microchip, y viendo el gran rendimiento y versatilidad, vi posible este proyecto. Para comenzar adquirí un poco de material y comencé el diseño de la parte electrónica y posteriormente de la mecánica, la cual me llevó un par de días en decidir como funcionaria mejor y que elementos definitivos tendría que usar, al principio pensé en usar motores DC, para que así en vez de patas tenga ruedas (que en realidad hubiese sido mucho mas fácil) pero bueno, me complique la vida queriendo usar servomotores de los que se usan en aeromodelismo/automodelismo por lo cual tuve que investigar como funcionan. Al cabo de un tiempo encontré información muy útil que me dio muchas ideas no solo para este robot si no para otro tipo de aplicaciones. Cabe mencionar que como el estilo araña seria su forma final, tuve que nada menos que capturar una araña y grabar con una cámara su movimiento y así poder llevar ese movimiento a los 3 servomotores que utilice (cada servomotor mueve 2 patas, 6 patas en total). POR QUE USAMOS SERVOMOTORES: Una de las ventaja de los servomotores es su fuerza y que si se le esta entregando señal adecuada quedan en una posición fija, y si tratas de moverlo el servo hace fuerza contraria para mantener su posición en que se dejo (gran ventaja en comparación a los motores DC y Paso a Paso.) la única desventaja es que originalmente solo trabajan de 0° a 180° pero se pueden modificar fácilmente para que giren 360º y así se pueden utilizar como motores y se les puede controlar la velocidad y el sentido de giro. LISTA DE COMPONENTES NECESARIOS: * 3 Reostatos de 1k. * 4 Resistencias de 10k. * 3 Resistencias de 1k. * 3 Resistencias de 220 ohmios. * 1 Regulador de voltaje 78m05. * 1 Cristal de 4mhz. * 1 PIC 16f84a (micro-controlador 84). * 1 Integrado lm324n. * 3 Leds. * 3 Foto-celdas. * 3 Servos FT-S148 (u otro de marca FUTABA con un torque de unos 3Kg). * 4 Pilas AA. * 1 Pila de 9V. * 2 Capacitadores Cerámicos 33pf (33 pico faradios). * 1 Capacitador Cerámico de 104f (104 faradios). CONSTRUCCIÓN DEL CHASIS Y LAS PATAS: Si alguien se anima puede mejorarlo, no solo construirlo igual a este. Para comenzar iré explicando por la parte mecánica para dar lugar más tarde a la parte electrónica analógica y digital. Lo primero de todo son las herramientas necesarias para la construcción del chasis y un instrumento para medir en el caso de la electrónica, algunos de ellos se muestran en la siguiente foto: Para la base del robot utilice un tubo de PVC estirado, obviamente un terciado delgado serviría también u otro tipo de plástico no tan grueso, para así no añadir demasiado peso adicional. Corte un pedazo de PVC en forma de rectángulo de 15cm su lado mayor y el menor de 9cm y puse los servos de tal forma que sus ejes de movimiento estuvieran en linea recta y en la mitad del rectángulo como se muestra en la foto de más abajo, además de los orificios que se marcan y distribuyen cuando estos están listos para ser montados, el detalle de los orificios no esta detallado ya que tienen que posicionarlos de manera uniforme en el rectángulo para mantener un equilibrio y estabilidad a futuro (mas adelante verán como son posicionados dentro de este rectángulo). Como se puede apreciar solo hay dos orificios para los servomotores, esto se debe a que uno de los servos tiene que ir en forma horizontal como lo veremos mas adelante. También hay unos cachos de plástico que soportaran el servo a una altura adecuada de la placa para que todos queden al mismo nivel cuando estén montados, estos son un rectángulo de 2cm por 1cm y como se ve en la figura son 4, además de 8 tornillos con dos tuercas por tornillo que nos fijaran dos de los servos, el tercero se fijara con un amarra cable ya que es mas practico por su posición en horizontal. Los tornillos son de 1.5mm por 1 pulgada. A continuación mostraremos el servo con su cabezal redondo y el alambre que nos servirá de patas para la primera parte, lo podéis ver en la siguiente foto: Como podéis ver tenemos un trozo de alambre de unos 25 cm de largo por 1.5mm cuadrado de sección, por cada servo se necesitan 3 tiras de esa misma medida ya que por firmeza tuve que agregarle esa cantidad ya que por el peso de este cuando esta terminado no era capaz de mantener rígidas las patas. El cabezal del servo tiene tres orificios por cada 90° y cada alambre se inserta de la manera mostrada en la siguiente foto: Como podéis ver en la foto ya esta ensamblado en uno de los 3 orificios falta que pase por el segundo y curvar el alambre para que tenga nuestra forma deseada: Aunque no se ve muy bien debo mencionar que el alambre pasa por los dos orificios y sale por la parte delantera del cabezal. En la siguiente foto ya se ve terminado con sus tres alambres por cabezal y envueltos con hincha aisladora para darle rigidez. En la siguiente foto ya esta montado en el eje con una de sus dos patas terminadas, así deben quedar dos de los 3 servomotores: El 3° servo los alambres y posición de estos deben quedar como se muestra en la siguiente foto: Si se fijan bien en la foto de arriba este es el servo que ira en la parte del medio y sus alambres están en otra dirección, este servo es el que se encarga de inclinar todo el cuerpo de la araña mientras los otros dos hacen que se desplace. Sin este servo no existe movimiento alguno ya que para poder avanzar hay que inclinar el peso hacia un lado para mantener el equilibrio y así poder alanzar con el otro pie, en este caso pasa algo similar, necesito inclinar el eje de equilibrio para que los dos servos restantes puedan hacer que la base completa se desplace. Como se ve en la siguiente foto ya tenemos los tres servos con sus respectivas cabezas y patas terminadas lista para ser montadas al final del proyecto cuando todo este en su sitio: COMENZAMOS EL MONTAJE: En la siguiente foto se puede ver el primer servo en su sitio con sus tornillos y soportes de plástico pequeños, fíjense que el eje de giro se encuentra en la mitad de la base marcado con una línea: En la siguiente foto tenemos ya montado el segundo servo, que se monta de forma igual al anterior: En la siguiente foto se ve la parte superior en donde esta anclado el servo con sus tuercas que mantendrán el servo en su posición: En la siguiente foto se puede ver el 3º servo que va en forma horizontal con sus amarra cable como sujeción: En la siguiente foto se observa con mas detalle el posicionamiento de los servos, observe que el servo que tiene el número 1 su cable de control ha sido pasado por el orificio que esta a un costado: Aquí es importante que tengan cada servo enumerado como se puede ver en la foto de arriba, en una esquina el servo 0 en la otra el 2 y en el medio el 1 también se debe marcar el terminal de conexión del servo con el numero que corresponda, ya que esto nos servirá para entender su conexionado posterior y para el que entienda de programación sepa en el programa de movimiento que servo es el que se debe mover. LA ALIMENTACIÓN ELÉCTRICA: Para mover los servos usaremos 4 pilas AA de 1,5V. cada una y para la parte electrónica analógica y digital una pila de 9V. que limitaremos a 5V. con un regulador de voltaje. Y no olvidéis comprar también un porta-pilas para 4 pilas AA y un conector para la pila de 9V, como veis en al foto superior, así podremos posicionar dichos elementos más fácilmente en nuestro robot, para sujetar la placa que contendrá el circuito yo usaré 2 gomas elásticas como podéis ver en la foto: EL CIRCUITO: Como podéis ver más abajo está el esquema electrónico que se encarga de verificar la fuente de luz, que en este caso usamos 3 sensores de luz para direcionar entre Izquierda, Centro y Derecha, y que son llevados al microcontrolador (16F84A) que se encargará de procesar y enviar las ordenes a los servomotores para poder hacer lo que se pretende, que es mover la araña en el sentido de la fuente de luz. DIBUJO DEL CIRCUITO: En el dibujo de arriba esta detallada cada sección de todo el conjunto, la parte Analógica que se encarga de enviar la señal al microcontrolador (Control digital) su fuente de alimentación y regulación y finalmente la parte de potencia que son los servomotores. Voy a explicar cada una de ellas para que entiendan como funciona cada parte del circuito. Comenzando con la parte analógica vemos en el costado izquierdo superior que tenemos 3 LDR’s que nos darán la posición de la fuente de luz, y son puestos en un circuito integrado que esta configurado como comprobador de voltaje y que para un LDR entendemos que: Al aplicarle luz a la foto resistencia su valor disminuye ingresando por la entrada negativa del operacional un valor que se compara por el de la resistencia variable de 1k ohm cuando este valor es igual a la salida del operacional tenemos un alto (3,3V. aproximadamente) y cuando no existe luz este valor de voltaje es diferente por el cual la salida de ese operacional es de 0 Voltios. A la salida de cada operacional se conecta diodos LED que se encargan de avisarnos el estado de las entradas y así poder verificar y ajustar con las resistencias variables de 1k ohm el valor de luz o mejor dicho la sensibilidad a la luz que queremos que funcione nuestro robot, si se encuentra encendido algún led es por que esta llegando luz de alguna fuente del ambiente, para dejarlo apagado solo se tiene que ajustar la resistencia de 1k ohm hasta que se apague. Debo mencionar que estos indicadores deben estar apagados en un comienzo para así al aplicarles luz comience a funcionar el robot según la dirección del rayo de luz. Aquí podemos sacar en conclusión que para los 3 LDR’s tenemos 8 posibles combinaciones que nos darán los diferentes estados que serán procesados por el micro-controlador, esta tabla se muestra en la siguiente imagen: Ya sabemos que el 0 corresponde a un 0 lógico y los 3,3V. a un 1 lógico por lo que tenemos una tabla con todas las posibles combinaciones y su respectivo movimiento que llevara a cabo finalmente. En la parte de control Digital se toman estos valores y según nuestra tabla, se le enviaran las señales al servo que corresponda para hacer un movimiento en particular, y para entender que tipo de señal se le debe enviar, detallare a continuación como funciona un servomotor: Como se muestra en la figura y como mencioné anteriormente el servo tiene una movilidad de 180° y funciona con lo que se conoce como modulación por ancho de pulsos o PWM. Osea este servo que es de la marca FUTABA de Radio-Control, funciona a 50Hz, o sea en un segundo le son enviados 50 pulsos, y con un simple calculo se puede dividir 1/50 y nos dará 20miliseg el ancho de pulso se utilizara para el trabajo del movimiento de este: Osea trabajando en este pequeño intervalo, podemos poner en un ángulo a nuestro antojo el servomotor y que se quede allí hasta que cambiemos ese pulso por otro. Para 0° tenemos que tener un pulso de 0,2 mili segundos y el resto un pulso bajo hasta los 20 mili-segundos, esto repetidamente 50 veces nos da los 50 Hz y por consecuencia el servo en la posición 0° como se muestra en la figura. Para 90° tenemos que aplicar un pulso de 1,5 mili segundos y el resto en pulso bajo hasta los 20 mili-segundos, esto repetidamente por 50 Hz nos dará la posición 90°, también mostrado en la figura. Y para 180 ° tenemos que aplicar un pulso de 2,2 mili segundos y el resto en pulso bajo hasta los 20 mili-segundos, esto repetidamente por 50 Hz nos dará la posición 180°. Para este caso en particular se uso como centro 90° y se calcularon matemáticamente los pulsos para 66,5° y 112,5° que serán los 3 ángulos usados para que camine nuestra araña. En el programa en ASM se detallan los tiempos de estos pulsos como asi las rutinas usadas para el movimiento podéis verlos en este documento de texto: http://www.robotic-lab.com/tutorial_robot_spider/robot.txt Debo mencionar que para aumentar la rapidez entre servo y servo en vez de repetir 50 veces el movimiento por servo lo disminuí a 8 y para centrarlo a 13 veces. No pretendo explicar el programa ya que seria muy largo, pero bien resumido el programa analiza los niveles lógicos de los sensores LDR que son 8 para así ejecutar una rutina de movimiento X y así poder llevar los 3 servos en una dirección X, este movimiento esta comprobado y posteriormente será puesto un vídeo con su desempeño. Aquí mostramos el ensamble de la parte analógica en un protoboard y que usa el circuito integrado para llevar la información de los LDR a niveles lógicos que el micro-controlador procesara a futuro, también están las LDR los Diodos LED que indicaran cuando se este alumbrando cada LDR. Aquí se encuentra ensamblado el circuito digital de proceso con su micro-controlador y sus accesorios como la pequeña regleta de conexionado donde irán los servos conectados, y la fuente regulada que se encarga de pasar los 9 volt a los 5 volt de trabajo del Micro-controlador y que también será usado para la parte analógica Aquí ya esta ensamblado los dos protoboard y unidas las señales de control como las fuentes tal como salían en el esquema del circuito. solo queda ponerlo sobre la base y conectar los servos como se muestra en la siguiente Figura. Un de talle importante es que la parte que tiene los sensores (LDR), debe ir sobre el servo con la numeración 0. Aquí ya esta ensamblado casi por completo el circuito. Solo nos queda colocar en su posición cada pata de nuestra araña (Ver siguiente Figura.). Y ya estamos listos Ya esta terminada nuestra araña solo queda programar el Micro-controlador con un programador para PIC y ver si responde a nuestro mandato de luz. Espero la disfruten! Aquí tenéis un vídeo en el que se puede ver como reacciona a la luz: Mostrando la parte analógica en funcionamiento. ACTUALIZACIÓN: Mejorando algunas rutinas, perfeccionando el movimiento y acelerando el tiempo de movilidad entre servo y servo, logre un mejor desempeño en cuanto a su movilidad. Con este nuevo programa mi robot quedo mas ágil y gira con mayor facilidad, aquí lo tenéis: http://www.robotic-lab.com/tutorial_robot_spider/robot2.txt Y aquí un vídeo de la araña con el nuevo programa:
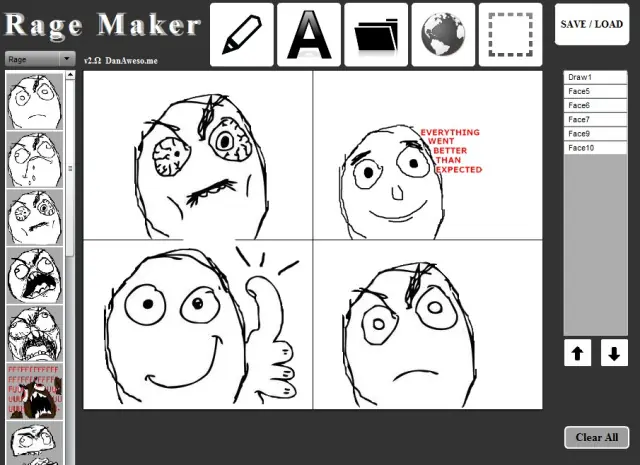
Crea tus propias viñetas de memes Hola! En este post vas a saber como hacer tus propios memes faciles No se necesita paint ni descargar nada aqui la pag: http://ragemaker.net/ Aqui unas fotos: Como ven aqui en las fotos es facil Viene todo ordenado los memes por ejemplo Neutral Happy es feliz Miscellaneus unas cosas Stupidity stupid*** Laughing ahi van a encontrar el que no lei un carajo Angry molestos o enojados Rage Furia fuuuuuuuuuuuuuu Malicius Troll Todos los memes troll Female Blond-La mujer pelo Naranja Female Black-La mujer pelo Negro Female Brunette La mujer pelo Marron Female Red La mujer pelo Rojo Female Hair-El pelo de todas las female's para encontrar en que no estan sus caras Cereal-Newspaper - Los memes comiendo cereal y leyendo periodico Text-Accsesories-Accsecorios para los memes para diferenciar Some time later-Un tiempo despues fuuuuuuuuuuuuuuuuuuddddddd-Comida Unas cosas para no hacerlo tan dificil y que lo entiendan Esa herramienta sirve para escribir Esas herramientas sirver para agregar viñetas o restar viñetas Esa herramienta sirve para ver como quedo tu comic al apertar save se guardara y les aparecera Save Disk apretan ahi y lo guardan donde quieran PD:SE ME OLVIDOO PARA PONER UN MEME TENES QUE ARRASTRARLO A LA VIÑETA Y TAMBIEN LA CRUZ ROJA SIRVE PARA ELIMINAR LA FIGURA LA PANTALLA PEQUENITA TE PERMITE DAR VUELTA VUELTA LA FIGURA EL CUADRADO AZUL SIRVE PARA AMUENTAR O RESTAR EL TAMAÑO DE LA FIGURA MEME BUENO ESO FUE TODO ESPERO QUE LES GUSTE ADIOS!
hola taringueros les traigo este post 1)_No harás caso a tu familia, edad o novia, y seguirás jugando hasta la ceguera. 2)_Honrarás a Mario, Sonic, Pac, los snow brothers, Terry Bogard, el chaboncito azul del Contra y la parejita del Ferrari del Out Run. 3)_Respetarás a las obras maestras tanto de pc como de consola, aunque no te gusten. 4)_No jugarás con teclado o en red ni descargarás guias de un juego recién comprado, JAMAS. 5)_Recordarás al menos un "Fatality" del mortal Kombat original. 6)_Debido al uso, romperás al menos un control pad de cada consola que tengas. 7)_No prestarás tus juegos preferidos, pero los recomendarás con pasión. 8)_Probarás al menos un RPG de cada generación. 9)_No te burlarás de las limitaciones técnicas de las consolas que no tengas. 10)_Nunca tendrás suficientes juegos. 11)_Tu nickname e email pertenecerán a algún personaje de videojuego. 12)_Juzgarás a la pc como a la última alternativa de entretenimiento, y será para usar aventuras gráficas o emuladores de consolas. 13)_Llevarás tu consola junto a tí y predicarás las bondades de tenerla. 14)_Conservarás tu primer ejemplar de la Action Games o Hobby Consolas, con Bart Simpson en la tapa. 15)_Sonreirás cuando escuches un "Hadouken" bueno eso fue todo espero que les aya gustado