djchikito011
Usuario (Argentina)

Google declara la guerra a los trolls de los comentarios Mientras Twitter busca de una vez por todas herramientas para luchar contra el abuso de forma futil, a Google las cosas le van un poco mejor en este sentido. Ahora, y para seguir luchando contra este problema en la red, ha creado Perspective, una herramienta basada en Machine Learning con la que Google quiere luchar contra los trolls de Internet. Y la cosa promete. Esta nueva herramienta de Google y Jigsaw utiliza aprendizaje automático para analizar los comentarios y evaluarlos, basándose en el parecido que tienen con comentarios que, anteriormente, los usuarios reales han marcado como “tóxicos” o reportados como SPAM, malicioso o dañino. Perspective examina decenas de miles de comentarios etiquetados y cuando la herramienta detecta alguno tóxico, y lo detecta correctamente, mejora su capacidad para evaluar los futuros comentarios hasta que pueda ser 100% autónoma con el paso del tiempo. La tecnología de Perspective todavía se encuentra en su primera etapa de desarrollo, pero su herramienta de aprendizaje automático para ayudar a identificar comentarios tóxicos ya está siendo probada por Google y puede ser integrada, en pruebas eso sí, por cualquier interesado. Ejemplo del trabajo de Perspective: Lo interesante de verdad del asunto es que Perspective puede ser utilizada de forma gratuita por todo aquel que quiera integrarlo en su plataforma. Es una tecnología de Google para todo el mundo, basada en el código abierto. De esta forma cualquier usuario la puede utilizar en su medio con sección de comentarios para que sea la plataforma la que se encargue de moderar los contenidos y luchar contra los trolls. RESUMEN LVL 5: Si Taringa incluye esta herramienta, nos vamos al joraca!!!!!!
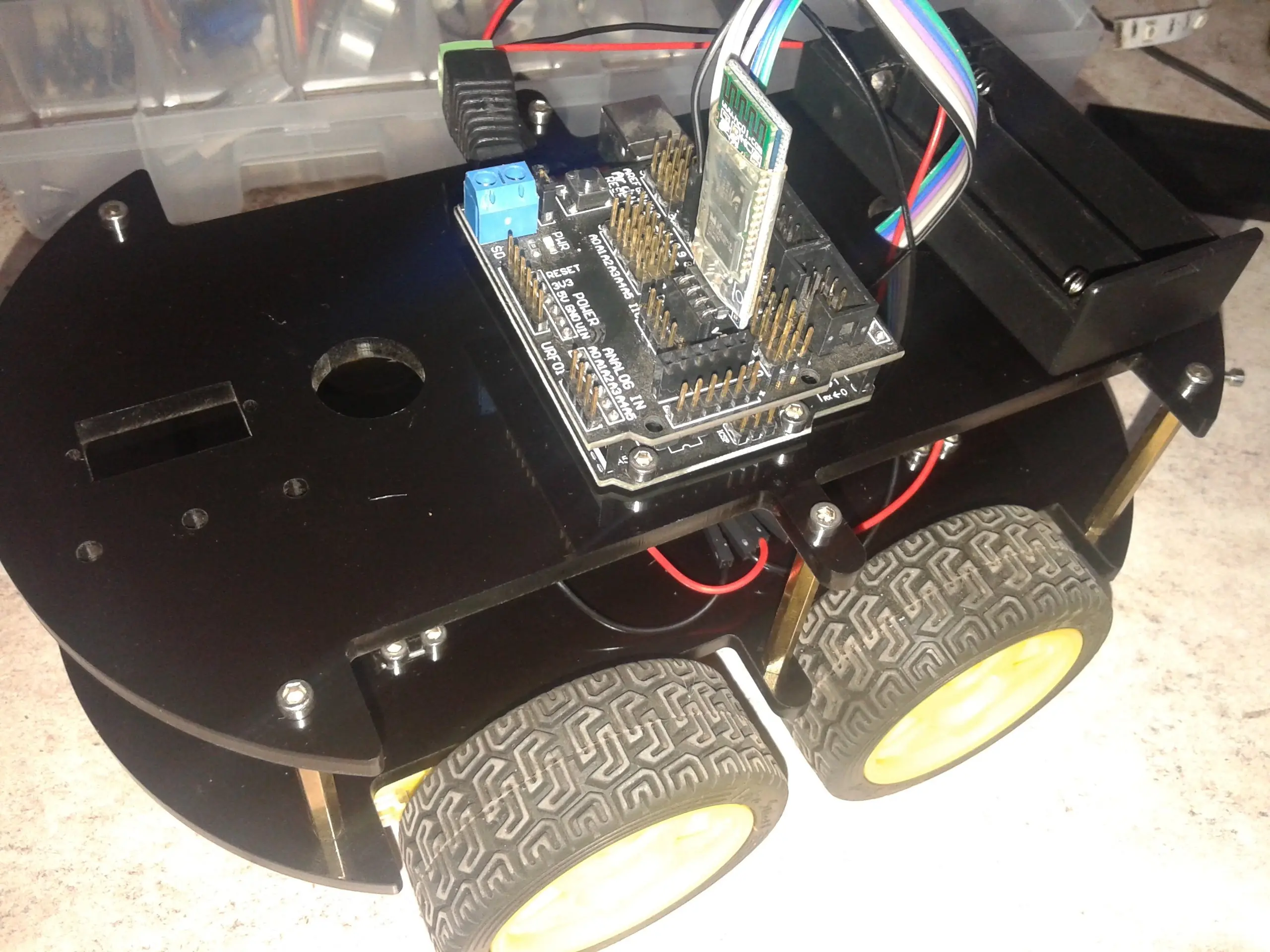
Buenas a todos!!! Hace poquito les traje un post relacionado a mi trabajo: Pero ahora les traigo algo de mi hobby personal, que hago sin horarios ni ánimos de lucro, programar y hacer electrónica. Les voy a mostrar el proceso para hacer un autito bastante simple con arduino, utilizando un par de elementos como lo son una placa de Arduino UNO, Un Arduino Sensor Shield V5, un puente H (en este caso utilice un L298N), un Módulo Bluetooth y un Celular o Tablet(cualquiera que tenga android) Quedaría algo así: Primero, aca dejo una lista de los distintos materiales que utilice, algunos hay que comprarlos si o si pero otros, como la carcaza, podes hacerla vos mismo o reutilizar algún auto de juguete de tus nenes (espero que no le rompan un autito para inventar esto, si anda, déjaselo al bepi y conseguí otra cosa!!!) En mi caso, compre esto por ML. Carcasa + Motores DC + Alojamiento de baterías (no es precisamente este articulo, el que yo había comprado no existe mas) http://articulo.mercadolibre.com.ar/MLA-621167979-kit-chasis-auto-robot-smart-car-4wd-4-ruedas-motores-arduino-_JM Arduino UNO R3 Yo compre un Arduino Original, de los italianos, pero con cualquiera funca! http://articulo.mercadolibre.com.ar/MLA-640709166-arduino-uno-r3-original-cable-usb-chip-desmontable-atmel-_JM Arduino Sensor Shield V.5 Como luego al autito le fui agregando varias cosas (seguidores de linea, sensor ultrasonido, control remoto por infrarrojo) necesite si o si agregarle este Shield. http://articulo.mercadolibre.com.ar/MLA-627557424-shield-arduino-v50-motores-sensores-expansion-_JM Puente H L298N El puente H va a servirnos para poder seleccionar la dirección de la rotación de los motores, ademas de poder controlar la fuerza con la que funcionaran. http://articulo.mercadolibre.com.ar/MLA-627530983-doble-puente-h-driver-l298n-motor-dc-arduino-arm-avr-_JM Cables P/Proto-Arduino Con respecto a los Cables, pueden utilizar cualquiera que entren en el arduino, pero si quieren algo mejorcito, utilicen estos... http://articulo.mercadolibre.com.ar/MLA-620382033-pack-40-cables-macho-macho-30cm-dupont-arduino-y-protoboard-_JM Modulo bluetooth Y por ultimo un Modulo Bluetooth o, en su defecto, un nodo receptor de Infrarrojo con su respectivo control.... El código fuente cambiara un poco, pero no es nada de otro mundo. Si se deciden por el Modulo Bluetooth, elijan uno que sea Máster-Esclavo, porque nos tendremos que conectar a ese Modulo desde el celular! http://articulo.mercadolibre.com.ar/MLA-621093852-bluetooth-module-hc-05-master-slave-uart-arduino-arm-pic-_JM Pasamos al montaje!!!! Acá están todos los elementos a necesitar! Empezamos con los motores y las ruedas, en mi caso vinieron armados, pero las desarme y le saque un par de fotos para que se guíen: Una vez que tenemos ensambladas las ruedas a sus motores, pasamos a amurarlos a una de las placas del chasis: Una vez amuradas las 4 ruedas: Cuando tenemos toda la base terminada, colocamos las columnas que sostendrán la parte de arriba del chasis: Pasamos los cables de los motores por cualquier agujero que tenga la placa del chasis, y amuramos el Puente H, luego, le conectamos las entradas de señal a los cables: Aca prestamos atencion, porque empezamos a conectar cables sensibles, que si quedan mal conectados, podemos quemar los motores, o el Puente H, todo tiene que quedar EXACTAMENTE como esta en la foto, no importa si invertimos los polos, pero nunca conectar un positivo y un negativo al mismo lado de la salida del Puente. Aca se muestran los 4 motores conectados, y ademas le metemos dos cables pelados a la alimentacion, tal como se muestra: Proseguimos a amurar la placa superior del chasis, quedando asi: Bueno, ya tenemos un chasis compacto y casi listo, pasamos a ensamblar el Arduino con el Sensor Shield, tiene que quedar asi: (Tener en cuenta que para conectar, hay que unir los últimos pines del Shield, con los últimos del Arduino) Hecho esto, amuramos el Arduino con el Shield, a la placa superior del chasis: Amuramos la caja donde irán las baterías (Yo utilice 2 pilas de 3.7V), y conectamos, junto con los dos cables que sacamos desde el Puente H, positivo con positivo y negativo con negativo, cada par a una toma del conector: Y enchufamos al arduino: Pasamos a conectar los cables de señal del Puente H al Sensor Shield, de la siguiente manera: PUENTE H----------SENSOR SHIELD ENA-------------------Pin de Señal N10 N1---------------------Pin de Señal N9 N2---------------------Pin de Señal N8 N3---------------------Pin de Señal N7 N4---------------------Pin de Señal N6 ENB-------------------Pin de Señal N5 Una vez echo esto, conectamos el Modulo Bluetooth tal cual esta aca: Y listo el ensamblado. PASAMOS AL CODIGO Pasamos a la parte de codigo, para eso, conectamos el Arduino, mediante Cable USB, a la PC: Una vez echo eso, tenemos que tener instalado el IDE de Arduino, que se baja gratuitamente de acá Bajar IDE Arduino Una vez adentro del IDE, configuramos la placa a utilizar, y el puerto (usb), donde va a estar conectado el Arduino, tiene que quedar así: Echo esto, este es el código fuente que deberán copiar dentro del IDE, así como esta funciona, pero si quieren mejorarlo, bienvenido sea! Desde aca se puede bajar directamente: "https://drive.google.com/file/d/0B7Y4fHrCMZwZLWRINC1pYmJDM0k/view" //Código Auto "Virgoncho V.0.1 - Para Taringa - By Djchikito" //en esta variable almacenaremos la entrada de datos del modulo Bluetooth char getstr; //Inicializamos los pines en los que estan conectados los motores int in1=6; int in2=7; int in3=8; int in4=9; //Inicializamos las entradas PWM del puente H, ENA es para la parte derecha y ENB la izquierda //mediante esta forma, podremos controlar la potencia de los motores, por lo tanto, su velocidad int ENA=5; int ENB=10; //Definimos una velocidad de inicio int VELOCIDAD=185;//EMPIEZA A VELOCIDAD MEDIA int VELOCIDAD_GIRO= 130;//Cuando Gira, gira siempre a esta velocidad establecida //Empezamos con el codigo practico, de esta manera vamos a ir moviendo el aparato. void _mAdelante() { //empezamos activando los puentes indicandole a que velocidad va a arrancar (es PWM, por eso enviamos una señal analogica) analogWrite(ENA,VELOCIDAD); analogWrite(ENB,VELOCIDAD); //Vamos a indicar como se van a prender los motores, in1 es "Motor1 - positivo" y in2 es "Motor1 - negativo" // in3 es "Motor2 - positivo" y in4 es "Motor2 - negativo" // Esto varia dependiendo de como conectaron los motores (si invirtieron cables...) digitalWrite(in1,HIGH); digitalWrite(in2,LOW); digitalWrite(in3,HIGH); digitalWrite(in4,LOW); //esto se mostrara en la consola de la app en el celu, tiene poca utilidad por lo que se puede eliminar Serial.println("ADELANTE"; } void _mAdelanteDerecha() { //para girar mientras va hacia adelante, hacemos que uno de los puentes vaya mas lento que el otro, por lo que yo dividi su velocidad analogWrite(ENA,VELOCIDAD); analogWrite(ENB,(VELOCIDAD/3)); digitalWrite(in1,HIGH); digitalWrite(in2,LOW); digitalWrite(in3,HIGH); digitalWrite(in4,LOW); Serial.println("ADELANTE"; } void _mAdelanteIzquierda() { analogWrite(ENA,(VELOCIDAD/3)); analogWrite(ENB,VELOCIDAD); digitalWrite(in1,HIGH); digitalWrite(in2,LOW); digitalWrite(in3,HIGH); digitalWrite(in4,LOW); Serial.println("ADELANTE"; } void _mAtras() { analogWrite(ENA,VELOCIDAD); analogWrite(ENB,VELOCIDAD); digitalWrite(in1,LOW); digitalWrite(in2,HIGH); digitalWrite(in3,LOW); digitalWrite(in4,HIGH); Serial.println("ATRAS"; } void _mIzquierda() { analogWrite(ENA,VELOCIDAD_GIRO); analogWrite(ENB,VELOCIDAD_GIRO); digitalWrite(in1,LOW); digitalWrite(in2,HIGH); digitalWrite(in3,HIGH); digitalWrite(in4,LOW); Serial.println("IZQUIERDA"; } void _mDerecha() { analogWrite(ENA,VELOCIDAD_GIRO); analogWrite(ENB,VELOCIDAD_GIRO); digitalWrite(in1,HIGH); digitalWrite(in2,LOW); digitalWrite(in3,LOW); digitalWrite(in4,HIGH); Serial.println("DERECHA"; } void _mAlto() { //frenamos todo y apagamos los puentes digitalWrite(ENA,LOW); digitalWrite(ENB,LOW); Serial.println("ALTO"; } void setup() { //aca en el setup definimos como van a trabajar los pines Serial.begin(9600); pinMode(in1,OUTPUT); pinMode(in2,OUTPUT); pinMode(in3,OUTPUT); pinMode(in4,OUTPUT); pinMode(ENA,OUTPUT); pinMode(ENB,OUTPUT); _mAlto(); } void loop() { //empieza el loop, este codigo va a ser el que se va a repetir constantemente, por lo tanto, hay que leer del bluetooth y hacer que se accionen los motores //Leemos el modulo getstr=Serial.read(); //cuando tenemos el mensaje en la variable getstr, vemos que mensaje llego y segun el mensaje, accionamos los metodos que estuvimos creando arriba. if(getstr=='f') { _mAdelante(); delay(100); } else if(getstr=='b') { _mAtras(); delay(100); } else if(getstr=='l') { _mIzquierda(); delay(100); } else if(getstr=='r') { _mDerecha(); delay(100); } else if(getstr=='s') { _mAlto(); } else if(getstr=='z') { _mAdelanteDerecha(); } else if(getstr=='x') { _mAdelanteIzquierda(); } else if(getstr=='1') { VELOCIDAD = 135; } else if(getstr=='2') { VELOCIDAD = 185; } else if(getstr=='3') { VELOCIDAD = 255; } } Una vez copiado esto, compilamos y le hacemos un commit al Arduino, para actualizar su código. PASAMOS AL CELULAR!!! Primero que nada, tenemos que bajar esta aplicación desde este link, que es propio): "https://drive.google.com/file/d/0B7Y4fHrCMZwZdlRWR3ZjYmcyMmM/view?usp=sharing" Lo que hace, es mostrarte varios métodos de entrada para enviar mensajes mediante Bluetooth, lo encontré en Internet y la verdad es una papa para usar. Cuando instalen la aplicación, les va a pedir para actualizar, metanle, que al actualizarse incluye un nuevo tablero que es el que utilizaremos. Esta es la pantalla principal de la app: Tocamos donde dice "CONNECT", y aparecerá esto, donde seleccionamos nuestra plaquita de Bluetooth (A esta altura el Autito tiene que estar ENCENDIDO y funcionando, sino el modulo bluetooth nunca emitirá señal y no podremos conectar ni editar nada en la App. (la primera vez que van a conectarse, la plaquita va a aparecer en "Other Available Decives", seguramente aparezca con el mismo nombre que me dio a mi, dependiendo de la placa que compren) Nos movemos a la parte de Keyboard, donde aparecera todo vacio, pero abajo de todo, donde dice "Edit Mode", tenemos que activarlo, y cuando toquemos una tecla, nos permitirá editar, siguiendo el cronograma de esta imagen, configuramos las teclas, exactamente con las palabras y letras que yo les puse, para evitar errores. Y Listo, si todo se salio bien, al apretar cualquier botón de la Aplicación el "Virgoncho" debería responder Ultima Certificada! Un videito bien casero donde se muestra que Funca! ESPERO LES HAYA GUSTADO!!! Cualquier duda o cosa que no se entendió, hablenme que les despejo las dudas o le soluciono problemas =) Saludos.