BIENVENIDOS


Mecánica y control de robots manipuladores (parte 2)
En esta entrega sobre robótica industrial les voy a presentar información sobre velocidades, fuerzas estáticas, singularidades, dinámica de manipuladores, generación de trayectorias y control de un robot manipulador, finalizando esta etapa introductoria al tema.
Si se perdieron la primera entrega, pueden acceder haciendo click , o para acceder a la introducción
Si se perdieron la primera entrega, pueden acceder haciendo click , o para acceder a la introducción
Velocidades, fuerzas estáticas, singularidades
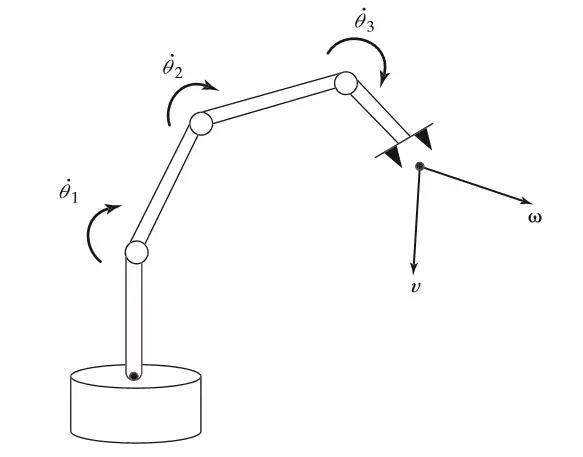
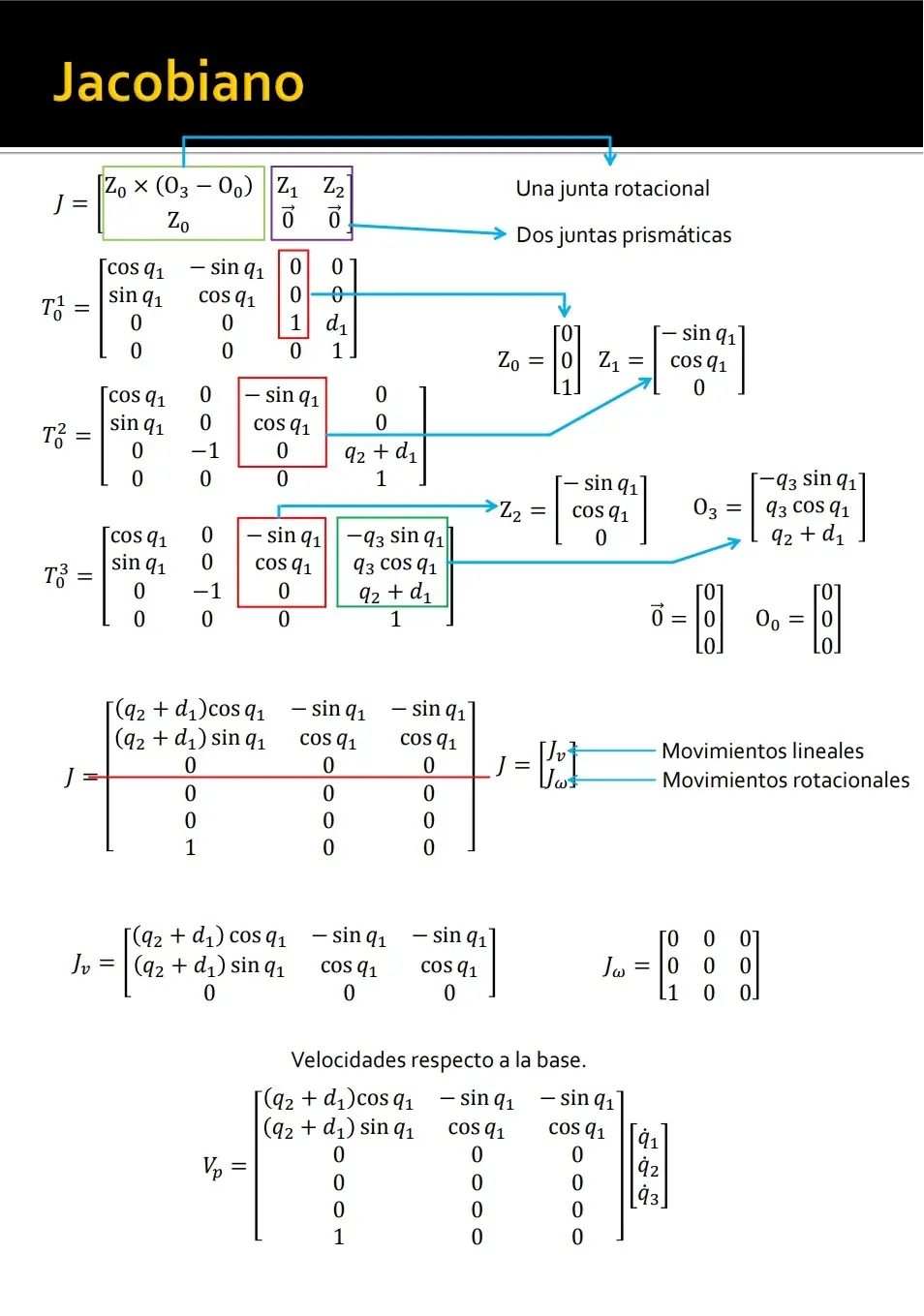
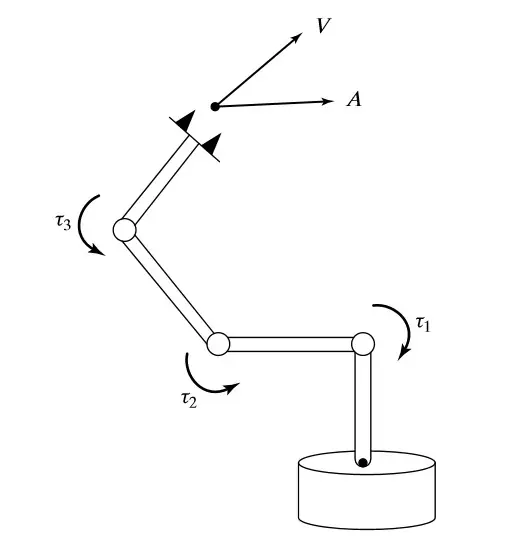
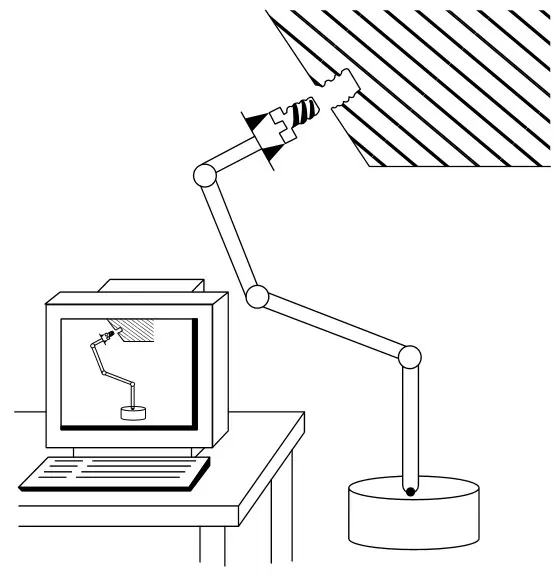
Además de tratar con los problemas de posicionamiento estático, es necesario analizar el comportamiento de los robots manipuladores en movimiento. Por lo general, cuando se realiza el análisis de velocidad de un mecanismo de este tipo, es necesario definir una matriz conocida como el jacobiano del manipulador.

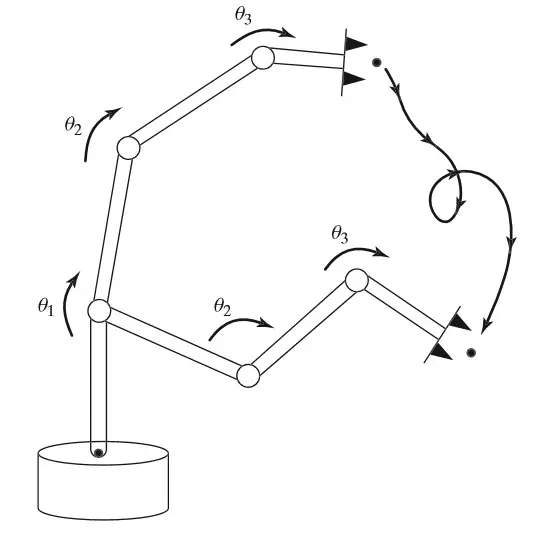
El jacobiano especifica la asignación de las velocidades en espacio de articulaciones a las velocidades en espacio cartesiano (ver imagen de abajo). La naturaleza de esta asignación cambia a medida que varía la configuración del manipulador. En ciertos puntos,
que reciben el nombre de singularidades, esta asignación no es invertible. Esto es un punto que deben tomar en cuenta los diseñadores y usuarios de robots manipuladores.
que reciben el nombre de singularidades, esta asignación no es invertible. Esto es un punto que deben tomar en cuenta los diseñadores y usuarios de robots manipuladores.
Como les expliqué en el , para esto se necesita cierta habilidad espacial y conocimiento en matemáticas, álgebra lineal, entre otras ciencias. El post es introductorio, sin embargo pienso retomar con la parte avanzada de este tema en próximas entregas.
Dinámica de un manipulador
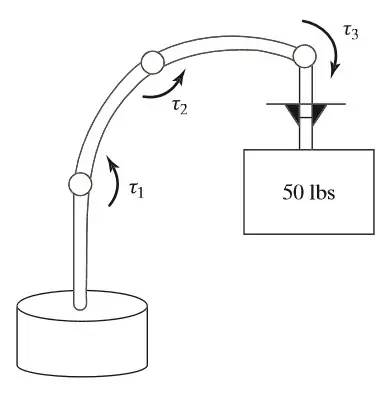
La dinámica es un campo dedicado al estudio de las fuerzas que se requieren para ocasionar el movimiento.
Por ejemplo, para poder acelerar un robot manipulador desde una posición inerte, deslizarlo a una velocidad constante del efector final y finalmente desacelerarlo por completo, los actuadores de las articulaciones deben aplicar un conjunto de funciones de momento torsor.
Por ejemplo, para poder acelerar un robot manipulador desde una posición inerte, deslizarlo a una velocidad constante del efector final y finalmente desacelerarlo por completo, los actuadores de las articulaciones deben aplicar un conjunto de funciones de momento torsor.
La forma exacta de las funciones requeridas de momento torsor de un actuador dependen de los atributos espaciales y temporales de la ruta tomada por el efector final, de las propiedades de masa de los vínculos y la carga útil, la fricción entre las articulaciones, etc.
Un método para controlar a un manipulador de manera que siga una ruta deseada implica calcular estas funciones del momento de torsión del actuador, utilizando las ecuaciones dinámicas de movimiento del manipulador.
Un método para controlar a un manipulador de manera que siga una ruta deseada implica calcular estas funciones del momento de torsión del actuador, utilizando las ecuaciones dinámicas de movimiento del manipulador.
Probablemente algunos de ustedes han experimentado la sensación de levantar un objeto que es en realidad mucho más ligero de lo que esperaban (por ejemplo, levantar un envase de leche pensando que está lleno cuando en realidad está vacío). Este mal cálculo de la carga útil puede producir un movimiento de levantamiento inusual. Este tipo de acotación indica que el sistema de control humano es más sofisticado que un esquema cinemático puro. Nuestro sistema de control de manipulación hace uso del conocimiento de la masa y otros efectos dinámicos. Del mismo modo, los algoritmos que diseñamos para controlar el movimiento de un robot manipulador deben tomar en cuenta la dinámica.
Generación de trayectorias
Una manera común de hacer que un manipulador se mueva de aquí para allá, de una forma suave y controlada, es hacer que cada articulación se mueva según lo especificado por una función continua en el tiempo Por lo general, cada articulación inicia y termina su movimiento al mismo tiempo, de modo que el movimiento del manipulador parece coordinado.
La manera exacta de calcular estas funciones de movimiento corresponde a la generación de trayectorias.
La manera exacta de calcular estas funciones de movimiento corresponde a la generación de trayectorias.
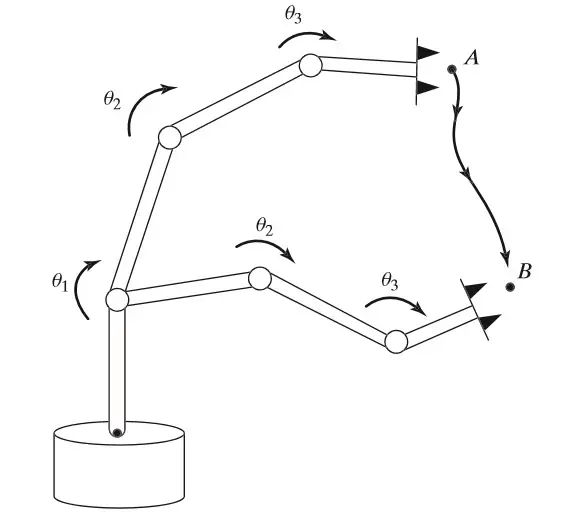
Para poder forzar al efector final a que siga una línea recta (o cualquier otra trayectoria), el movimiento deseado debe convertirse a un conjunto equivalente de movimientos de articulaciones. De modo más formal se le conoce como generación de trayectorias cartesianas y será analizado en un post a futuro.
Sobre el diseño y sensores del manipulador
Aunque los manipuladores son, en teoría, dispositivos universales que se aplican a muchas situaciones, la economía generalmente dicta que se debe orientar el diseño mecánico hacia la gama de tareas que va a realizar el robot. Junto a otras cuestiones como tamaño, velocidad y capacidad de carga, el diseñador también debe considerar el número de articulaciones y su arreglo geométrico, debido a que afectan al tamaño y calidad del volumen de trabajo, la rigidez de la estructura, entre otros atributos.
Entre más articulaciones contenga el brazo de un robot, adquiere más destreza y capacidad, pero también resulta más complicado de construir (y obviamente costoso).
Entre más articulaciones contenga el brazo de un robot, adquiere más destreza y capacidad, pero también resulta más complicado de construir (y obviamente costoso).

Además del diseño del manipulador están las cuestiones relacionadas con la elección y ubicación de actuadores, sistemas de transmisión y sensores de posición interna (y algunas veces de fuerza).
Control de posición lineal
Algunos manipuladores están equipados con motores a pasos u otros actuadores que pueden ejecutar directamente la trayectoria deseada. Sin embargo, la gran cantidad de manipuladores se controlan mediante actuadores que suministran una fuerza o un par de torsión para mover los vínculos.
Algunas de las principales preocupaciones de un sistema de control de posición son compensar automáticamente los errores en los parámetros del sistema y suprimir las perturbaciones que tienden a desviar al manipulador de la trayectoria deseada. Para lograrlo, el algoritmo de control vigila los sensores de posición y velocidad, determinando los comandos de momento torsor para los actuadores.
Algunas de las principales preocupaciones de un sistema de control de posición son compensar automáticamente los errores en los parámetros del sistema y suprimir las perturbaciones que tienden a desviar al manipulador de la trayectoria deseada. Para lograrlo, el algoritmo de control vigila los sensores de posición y velocidad, determinando los comandos de momento torsor para los actuadores.
Control de posición no lineal
Aunque los sistemas de control basados en modelos lineales aproximados son populares entre los robots industriales de la actualidad, es importante considerar la dinámica no lineal completa del manipulador al sintetizar los algoritmos de control. Actualmente se están creando nuevos algoritmos no lineales más óptimos y potentes para robots manipuladores industriales.

Control de fuerza
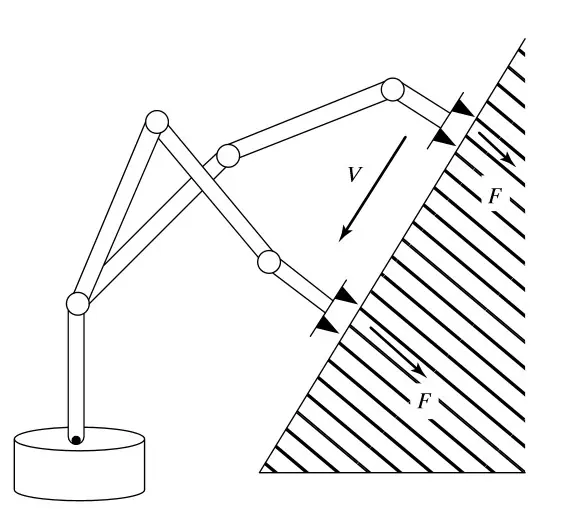
La habilidad de un manipulador para controlar las fuerzas de contacto al tocar las piezas, herramientas o superficies de trabajo es de gran importancia.
El control de fuerza es complementario al control de posición. Por ejemplo, si el robot se mueve en el aire, posiblemente será suficiente con el control de posición, pero al entrar en contacto con algo,
puede haber una acumulación de fuerzas de contacto que generen un exceso de fuerza, o en su defecto una falta que haga perder el contacto entre superficies rígidas.
El control de fuerza es complementario al control de posición. Por ejemplo, si el robot se mueve en el aire, posiblemente será suficiente con el control de posición, pero al entrar en contacto con algo,
puede haber una acumulación de fuerzas de contacto que generen un exceso de fuerza, o en su defecto una falta que haga perder el contacto entre superficies rígidas.

Los manipuladores rara vez se ven afectados por superficies de reacción en todas las direcciones simultáneamente, por lo que se requiere un control híbrido o mixto, donde algunas direcciones se controlan mediante una ley de control de posiciones, y las direcciones restantes se controlan mediante una ley de control de fuerza.
Acerca de la programación de robots manipuladores
Un lenguaje de programación de robots sirve como interfaz entre el usuario y el robot industrial. A continuación algunas preguntas clave que surgen respecto a la programación:
- ¿Cómo describir los movimientos a través del espacio?
- ¿Cómo programar varios manipuladores para que trabajen en paralelo?
- ¿Cómo describir en un lenguaje de programación las acciones basadas en sensores?
En los robots comunes hay una manera rápida para describir la ruta a seguir. En primer lugar, el usuario señala un punto especial en la mano del manipulador o la herramienta que esté sujetando; posteriormente construye la ruta indicando puntos vía, generalmente definiendo ciertas velocidades a las que debe operar el robot en determinados tramos.
Con estas "soluciones", el algoritmo de generación de trayectoria debe planear los perfiles de velocidad para cada articulación, el tiempo de duración del movimiento, entre otros factores que puedan ser necesarios dependiendo de la aplicación. Todo esto en un lenguaje de programación determinado.
Con estas "soluciones", el algoritmo de generación de trayectoria debe planear los perfiles de velocidad para cada articulación, el tiempo de duración del movimiento, entre otros factores que puedan ser necesarios dependiendo de la aplicación. Todo esto en un lenguaje de programación determinado.

Programación fuera de línea y simulación
Un sistema de programación fuera de línea es un entorno de programación de robots, generalmente mediante gráficos computacionales, como para que pueda llevarse a cabo el desarrollo de programas sin la necesidad de acceder al robot en sí.
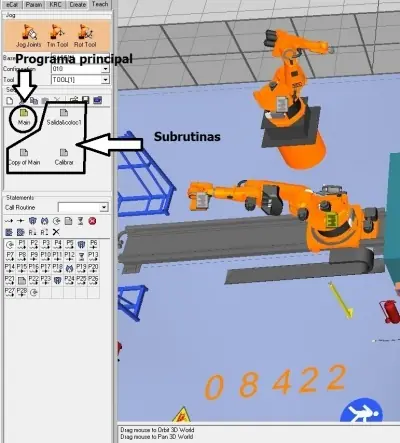
Este tipo de programación no necesita detener el equipo de producción (robot) para reprogramarlo, por lo tanto, las fábricas automatizadas pueden permanecer produciendo más tiempo, disminuyendo pérdidas que ocasionaría detener el equipo para programarlo en planta.
Además, la programación fuera de línea permite enlazar bases de datos de diseño asistido por computadora (CAD) que se utilizan al diseñar un producto, con la fabricación real del mismo. En algunos casos, el uso directo de los datos del CAD puede reducir notablemente el tiempo de programación requerido para el proceso de manufactura.
Además, la programación fuera de línea permite enlazar bases de datos de diseño asistido por computadora (CAD) que se utilizan al diseñar un producto, con la fabricación real del mismo. En algunos casos, el uso directo de los datos del CAD puede reducir notablemente el tiempo de programación requerido para el proceso de manufactura.
Notación
Para finalizar esta introducción a la robótica industrial voy a presentar las convenciones con respecto a notación en el estudio de robots manipuladores.
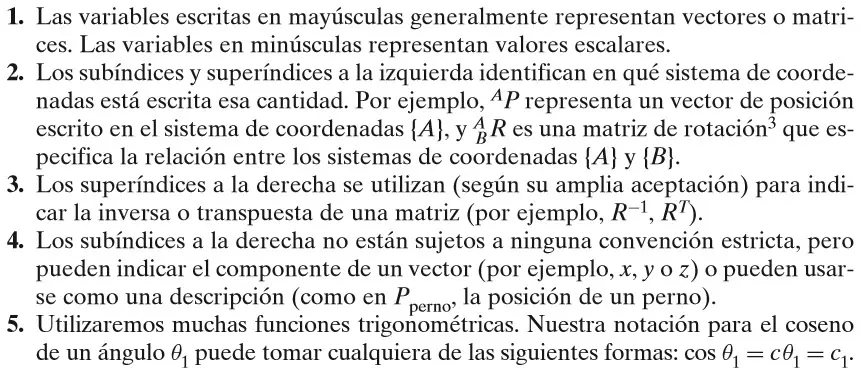
Además, todos los vectores serán considerados vectores columna; por lo tanto, los vectores fila tendrán la transpuesta indicada de forma explícita.
Si están interesados en aprender sobre temas similares,
visiten mi contenido haciendo click en la imagen de abajo
visiten mi contenido haciendo click en la imagen de abajo
