Holas a todos.¡Bienvenid@s al post de robots,robots,y todo de robots!.Les mostrare muchas cosas de los robots y mas.....¿Empezamos?
¿Que són?

Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de bots.
No hay un consenso sobre qué máquinas pueden ser consideradas robots, pero sí existe un acuerdo general entre los expertos y el público sobre que los robots tienden a hacer parte o todo lo que sigue: moverse, hacer funcionar un brazo mecánico, sentir y manipular su entorno y mostrar un comportamiento inteligente, especialmente si ése comportamiento imita al de los humanos o a otros animales.
Aunque las historias sobre ayudantes y acompañantes artificiales, así como los intentos de crearlos, tienen una larga historia, las máquinas totalmente autónomas no aparecieron hasta el siglo XX. El primer robot programable y dirigido de forma digital, el Unimate, fue instalado en 1961 para levantar piezas calientes de matel de una máquina de tinte y colocarlas.
Por lo general, la gente reacciona de forma positiva ante los robots con los que se encuentra. Los robots domésticos para la limpieza y mantenimiento del hogar son cada vez más comunes en los hogares. No obstante, existe una cierta ansiedad sobre el impacto económico de la automatización y la amenaza del armamento robótico, una ansiedad que se ve reflejada en el retrato a menudo perverso y malvado de robots presentes en obras de la cultura popular. Comparados con sus colegas de ficción, los robots reales siguen siendo limitados.
Los primeros autómatas
En el siglo IV antes de Cristo, el matemático griego Arquitas de Tarento construyó un ave mecánica que funcionaba con vapor y al que llamó "La paloma". También el ingeniero Herón de Alejandría (10-70 d. C.) creó numerosos dispositivos automáticos que los usuarios podían modificar, y describió máquinas accionadas por presión de aire, vapor y agua.Por su parte, el estudioso chino Su Song levantó una torre de reloj en 1088 con figuras mecánicas que daban las campanadas de las horas.
Al Jazarií (1136–1206), un inventor musulmán de la dinastía Artuqid, diseñó y construyó una serie de máquinas automatizadas, entre los que había útiles de cocina, autómatas musicales que funcionaban con agua, y en 1206 los primeros robots humanoides programables. Las máquinas tenían el aspecto de cuatro músicos a bordo de un bote en un lago, entreteniendo a los invitados en las fiestas reales. Su mecanismo tenía un tambor programable con clavijas que chocaban con pequeñas palancas que accionaban instrumentos de percusión. Podían cambiarse los ritmos y patrones que tocaba el tamborilero moviendo las clavijas.

Desarrollo moderno
El artesano japonés Hisashige Tanaka (1799–1881), conocido como el "Edison japonés", creó una serie de juguetes mecánicos extremadamente complejos, algunos de los cuales servían té, disparaban flechas retiradas de un carcaj e incluso trazaban un kanji (caracter japonés).
Por otra parte, desde la generalización del uso de la tecnología en procesos de producción con la Revolución Industrial se intentó la construcción de dispositivos automáticos que ayudasen o sustituyesen al hombre. Entre ellos destacaron los Jaquemarts, muñecos de dos o más posiciones que golpean campanas accionados por mecanismos de relojería china y japonesa.
Robots equipados con una sola rueda fueron utilizados para llevar a cabo investigaciones sobre conducta, navegación y planeo de ruta. Cuando estuvieron listos para intentar nuevamente con los robots caminantes, comenzaron con pequeños hexápodos y otros tipos de robots de múltiples patas. Estos robots imitaban insectos y artrópodos en funciones y forma. Como se ha hecho notar anteriormente, la tendencia se dirige hacia ese tipo de cuerpos que ofrecen gran flexibilidad y han probado adaptabilidad a cualquier ambiente.
Con más de 4 piernas, estos robots son estáticamente estables lo que hace que el trabajar con ellos sea más sencillo. Sólo recientemente se han hecho progresos hacia los robots con locomoción bípeda.
En el sentido común de un autómata, el mayor robot en el mundo tendría que ser el Maeslantkering, una barrera para tormentas del Plan Delta en los Países Bajos construida en los años 1990, la cual se cierra automáticamente cuando es necesario. Sin embargo, esta estructura no satisface los requerimientos de movilidad o generalidad.
En 2002 Honda y Sony, comenzaron a vender comercialmente robots humanoides como “mascotas”. Los robots con forma de perro o de serpiente se encuentran, sin embargo, en una fase de producción muy amplia, el ejemplo más notorio ha sido Aibo de Sony.
La robótica en la actualidad
------------------------------------------------------------------------------------------------------------------------------------------------------------
En la actualidad, los robots comerciales e industriales son ampliamente utilizados, y realizan tareas de forma más exacta o más barata que los humanos. También se les utiliza en trabajos demasiado sucios, peligrosos o tediosos para los humanos. Los robots son muy utilizados en plantas de manufactura, montaje y embalaje, en transporte, en exploraciones en la Tierra y en el espacio, cirugía, armamento, investigación en laboratorios y en la producción en masa de bienes industriales o de consumo.
Otras aplicaciones incluyen la limpieza de residuos tóxicos, minería, búsqueda y rescate de personas y localización de minas terrestres.
Expo 2005, Nagakute (Aichi)
Existe una gran esperanza, especialmente en Japón, de que el cuidado del hogar para la población de edad avanzada pueda ser desempeñado por robots.

Los robots parecen estar abaratándose y reduciendo su tamaño, una tendencia relacionada con la miniaturización de los componentes electrónicos que se utilizan para controlarlos. Además, muchos robots son diseñados en simuladores mucho antes de construirse y de que interactúen con ambientes físicos reales. Un buen ejemplo de esto es el equipo Spiritual Machine, un equipo de 5 robots desarrollado totalmente en un ambiente virtual para jugar al fútbol en la liga mundial de la F.I.R.A.
Además de los campos mencionados, hay modelos trabajando en el sector educativo, servicios (por ejemplo, en lugar de recepcionistas humanos[18] o vigilancia) y tareas de búsqueda y rescate.
Usos medicos
Recientemente, se ha logrado un gran avance en los robots dedicados a la medicina, con dos compañías en particular, Computer Motion e Intuitive Surgical, que han recibido la aprobación regulatoria en América del Norte, Europa y Asia para que sus robots sean utilizados en procedimientos de cirugía invasiva mínima. Desde la compra de Computer Motion (creador del robot Zeus) por Intuitive Surgical, se han desarrollado ya dos modelos de robot daVinci por esta última. En la actualidad, existen más de 800 robots quirúrgicos daVinci en el mundo, con aplicaciones en Urología, Ginecología, Cirugía general, Cirugía Pediátrica, Cirugía Torácica, Cirugía Cardíaca y ORL. También la automatización de laboratorios es un área en crecimiento. Aquí, los robots son utilizados para transportar muestras biológicas o químicas entre instrumentos tales como incubadoras, manejadores de líquidos y lectores. Otros lugares donde los robots están reemplazando a los humanos son la exploración del fondo oceánico y exploración espacial. Para esas tareas se suele recurrir a robots de tipo artrópodo.
con dos compañías en particular, Computer Motion e Intuitive Surgical, que han recibido la aprobación regulatoria en América del Norte, Europa y Asia para que sus robots sean utilizados en procedimientos de cirugía invasiva mínima. Desde la compra de Computer Motion (creador del robot Zeus) por Intuitive Surgical, se han desarrollado ya dos modelos de robot daVinci por esta última. En la actualidad, existen más de 800 robots quirúrgicos daVinci en el mundo, con aplicaciones en Urología, Ginecología, Cirugía general, Cirugía Pediátrica, Cirugía Torácica, Cirugía Cardíaca y ORL. También la automatización de laboratorios es un área en crecimiento. Aquí, los robots son utilizados para transportar muestras biológicas o químicas entre instrumentos tales como incubadoras, manejadores de líquidos y lectores. Otros lugares donde los robots están reemplazando a los humanos son la exploración del fondo oceánico y exploración espacial. Para esas tareas se suele recurrir a robots de tipo artrópodo.
Modelos de vuelo
En fases iniciales de desarrollo hay robots alados experimentales y otros ejemplos que explotan el biomimetismo. Se espera que los así llamados nanomotores y cables inteligentes simplifiquen drásticamente el poder de locomoción, mientras que la estabilización en vuelo parece haber sido mejorada substancialmente por giroscopios extremadamente pequeños.
Modelos militares
Un impulsor muy significativo de este tipo de investigaciones es el desarrollo de equipos de espionaje militar.
Destacan también el éxito de las bombas inteligentes y UCAVs en los conflictos armados, sin olvidar el empleo de sistemas robóticos para la retirada de minas antipersonales.
Arquitectura de los Robots
Existen diferentes tipos y clases de robots, entre ellos con forma humana, de animales, de plantas o incluso de elementos arquitectónicos pero todos se diferencian por sus capacidades y se clasifican en 4 formas:
1. Androides: robots con forma humana. Imitan el comportamiento de las personas, su utilidad en la actualidad es de solo experimentación. La principal limitante de este modelo es la implementación del equilibrio a la hora del desplazamiento, pues es bípedo.
2. Móviles: se desplazan mediante una plataforma rodante (ruedas); estos robots aseguran el transporte de piezas de un punto a otro.
3. Zoomórficos: es un sistema de locomoción imitando a los animales. La aplicación de estos robots sirve, sobre todo, para el estudio de volcanes y exploración espacial.
4. Poliarticulados: mueven sus extremidades con pocos grados de libertad. Su principal utilidad es industrial, para desplazar elementos que requieren cuidados.
Proyectos en marcha
* Proyecto Autómata Abierto. El propósito de este proyecto es desarrollar software modular y componentes electrónicos, desde los cuales sea posible ensamblar un robot móvil basado en una computadora personal que pueda ser utilizado en ambientes de casas u oficinas. Todo el código fuente es distribuido bajos los términos de la Licencia Pública General (GNU).
* ASIMO. Proyecto de robot humanoides de Honda.
* Dean Kamen, fundador de FIRST y de la Sociedad Americana de Ingenieros Mecánicos (ASME), ha creado una Competencia Robótica multinacional que reúne a profesionales y jóvenes para resolver problemas de diseño de ingeniería de manera competitiva. En 2003, el torneo contó con más de 20.000 estudiantes en más de 800 equipos en 24 competiciones. Los equipos vienen de Canadá, Brasil, Reino Unido y Estados Unidos. A diferencia de las competiciones de los robots de lucha sumo que se celebran regularmente en algunos lugares o las peleas de ficción de “Battlebots“ transmitidas por televisión, estos torneos incluyen la construcción de un robot.
Los robots en la ficción
Mitología
Muchas mitologías antiguas tratan la idea de los humanos artificiales. En la mitología clásica, se dice que Cadmo sembró dientes de dragón que se convertían en soldados, y Galatea, la estatua de Pigmalión, cobró vida. También el dios griego de los herreros, Hefesto (Vulcano para los romanos) creó sirvientes mecánicos inteligentes, otros hechos de oro e incluso mesas que se podían mover por sí mismas. Algunos de estos autómatas ayudan al dios a forjar la armadura de Aquiles, según la Ilíada[20] Aunque, por supuesto, no se describe a esas máquinas como "robots" o como "androides", son en cualquier caso dispositivos mecánicos de apariencia humana.
Una leyenda hebrea habla del Golem, una estatua animada por la magia cabalística. Por su parte, las leyendas de los Inuit describen al Tupilaq (o Tupilak), que un mago puede crear para cazar y asesinar a un enemigo. Sin embargo, emplear un Tupilaq para este fin puede ser una espada de doble filo, ya que la víctima puede detener el ataque del Tupilaq y reprogramarlo con magia para que busque y destruya a su creador.
Litertura
Ya en 1817, en un cuento de Hoffmann llamado El Coco, aparece una mujer que parecía una muñeca mecánica, y en la obra de Edward S. Ellis de 1865 El Hombre de Vapor de las Praderas se expresa la fascinación americana por la industrialización.
Como se indicaba más arriba, la primera obra en utilizar la palabra robot fue la obra teatral R.U.R. de Čapek,(escrita en colaboración con su hermano Josef en 1920; representada por primera vez en 1921; escenificada en Nueva York en 1922. La edición en inglés se publicó en 1923).
La obra comienza en una fábrica que construye personas artificiales llamadas robots, pero están más cerca del concepto moderno de androide o clon, en el sentido de que se trata de criaturas que pueden confundirse con humanos. Pueden pensar por sí mismos, aunque parecen felices de servir. En cuestión está si los robos están siendo explotados, así como las consecuencias por su tratamiento.
El autor más prolífico de historias sobre robots fue Isaac Asimov (1920-1992), que colocó los robots y su interacción con la sociedad en el centro de muchos de sus libros.White, Michael (2005). Isaac Asimov: a life of the grand master of science fiction (en inglés). Carroll & Graf, pp. 1-2. ISBN 0786715189.</ref>[21] Este autor consideró seriamente la serie ideal de instrucciones que debería darse a los robots para reducir el peligro que éstos representaban para los humanos. Así llegó a formular sus Tres Leyes de la Robótica: Ningún robot causará daño a un ser humano o permitirá, con su inacción, que un ser humano sufra daño; todo robot obedecerá las órdenes que le den los seres humanos, a menos que esas órdenes entren en conflicto con la primera ley; y todo robot debe proteger su propia existencia, siempre que esa protección no entre en conflicto con la primera o la segunda ley.
Esas tres leyes se introdujeron por primera vez en su relato corto de 1942 Círculo Vicioso, aunque habían sido esbozadas en algunos textos anteriores. Más tarde, Asimov añadió la ley de Cero: "Ningún robot causará daño a la humanidad ni permitirá, con su inacción que la humanidad sufra daño". El resto de las leyes se modificaron para ajustarse a este añadido.
Según el Oxford English Dictionary, el principio del relato breve ¡Mentiroso! de 1941 contiene el primer uso registrado de la palabra robótica. El autor no fue consciente de esto en un principio, y asumió que la palabra ya existía por su analogía con mecánica, hidráulica y otros términos similares que se refieren a ramas aplicadas del conocimiento.
Cine y televisión
El tono económico y filosófico iniciado por R.U.R. sería desarrollado más tarde por la película Metrópolis, y las populares Blade Runner (1982) o The Terminator (1984).
Existen muchas películas sobre robots, como Inteligencia Artificial de Steven Spielberg, o las dos películas basadas en los relatos de Isaac Asimov, Yo, Robot y El hombre bicentenario, asi también como Cortocircuito y la versión de Disney: Wall-E.
En televisión, existen series muy populares como Robot Wars y Battlebots, de batallas de estilo sumo entre robots.
También hay una pelicula con Bruce Willis nombrada "Identidad Sustituta"
Cuestiones éticas
Existe la preocupación de que los robots puedan desplazar o competir con los humanos . Las leyes o reglas que pudieran o debieran ser aplicadas a los robots u otros “entes autónomos” en cooperación o competencia con humanos si algún día se logra alcanzar la tecnología suficiente como para hacerlos inteligentes y conscientes de sí mismos, han estimulado las investigaciones macroeconómicas de este tipo de competencia, notablemente construido por Alessandro Acquisti basándose en un trabajo anterior de John von Neumann.
Actualmente, no es posible aplicar las Tres leyes de la robótica, dado que los robots no tienen capacidad para comprender su significado, evaluar las situaciones de riesgo tanto para los humanos como para ellos mismos o resolver los conflictos que se podrían dar entre estas leyes.
Entender y aplicar lo anteriormente expuesto requeriría verdadera inteligencia y consciencia del medio circundante, así como de sí mismo, por parte del robot, algo que a pesar de los grandes avances tecnológicos de la era moderna no se ha llegado
El impacto de los robots en el plano laboral
Muchas grandes empresas, como Intel, Sony, General Motors, Dell, han implementado en sus líneas de producción unidades robóticas para desempeñar tareas que por lo general hubiesen desempeñado trabajadores de carne y hueso en épocas anteriores.
Esto ha causado una agilización en los procesos realizados, así como un mayor ahorro de recursos, al disponer de máquinas que pueden desempeñar las funciones de cierta cantidad de empleados a un costo relativamente menor y con un grado mayor de eficiencia, mejorando notablemente el rendimiento general y las ganancias de la empresa, así como la calidad de los productos ofrecidos.
Pero, por otro lado, ha suscitado y mantenido inquietudes entre diversos grupos por su impacto en la tasa de empleos disponibles, así como su repercusión directa en las personas desplazadas. Dicha controversia ha abarcado el aspecto de la seguridad, llamando la atención de casos como el ocurrido en Jackson, Míchigan, el 21 de julio de 1984 donde un robot aplastó a un trabajador contra una barra de protección en la que aparentemente fue la primera muerte relacionada con un robot en los EE. UU.
Debido a esto se ha llamado la atención sobre la ética en el diseño y construcción de los robots, así como la necesidad de contar con lineamientos claros de seguridad que garanticen una correcta interacción entre humanos y máquinas.
Los robots en los deportes
Hay un juego considerado deporte de peleas de robots en una arena, estos robots tienen brazos, ganchos o cualquier artefacto para defenderse o ganarle a los demas, estas peles se transmiten en BATTLEBOTS un programa donde te dan las peleas de robots, hechas en California o Inglaterra
Clases de peso
Los Robots en los torneos de BattleBots fueron separados en cuatro categorías de peso. Los límites de peso se incrementó ligeramente con el tiempo. En los torneos de final de las clases fueron:
• Ligero: 60 libras (27 kilogramos)
• Medio: 120 libras (54 kilogramos)
• Heavyweight: 220 libras (100 kilogramos)
• Superheavyweight: 340 libras (154 kilogramos)
Partidos
Los partidos son tres minutos de duración. Durante un partido, dos robots hacen todo lo posible para destruir unos a otros con los medios disponibles.
Sólo hay dos acontecimientos que causan que el encuentro se hizo una pausa y las personas entrar en el BattleBox. Uno de ellos es el caso de que los robots están pegados y no se puede separar o que ambos tienen al mismo tiempo de la inactividad. El otro escenario es que uno o ambos 'contra los robots tienen atrapados en el fuego. En ese caso, las personas que entran en la BattleBox están equipadas con un extintor de incendios.
Si un robot es incapaz de moverse durante treinta segundos, porque es muy dañado o se ha quedado atascado en la arena riesgos, es declarado fuera de combate. El conductor también puede llamar a un "tap-out" para perder el partido si su robot está a punto de ser destruida. Esto termina el partido diez segundos después, el controlador de oposición es "pidió" (pero no ordena) a no atacar durante los diez segundo recuento.
En aproximadamente la mitad de los partidos, los dos robots sobrevivir a los tres minutos, en ese momento, tres jueces distribuirá un total de 45 puntos (15 puntos de un juez, 5 puntos por cada juez por cada categoría) en tres categorías. El robot con el puntaje más alto gana. Las categorías son a juzgar la agresión, la estrategia, y el daño. Un robot que queda atrás de forma segura de su oponente no tendrá muchos puntos de la agresión, uno en que la lucha contra todo el tiempo, sin embargo, la voluntad. La categoría de estrategia es de lo bien que un robot explota las debilidades de su oponente, protege su propia y se ocupa de los peligros. Un robot de conducción en las sierras matar perderá puntos aquí, a menos que haya una buena razón para hacerlo, mientras que un robot que es capaz de atacar los puntos débiles de su oponente ganará puntos. La categoría de daños es de cuánto daño puede manejar el robot a su oponente, mientras que permanecen intactas en sí.
El ganador se mueve en, el perdedor es eliminado del torneo.
Al final del torneo, una serie de "retumba" o "rondas de cuerpo a cuerpo 'se los realiza normalmente en cada categoría de peso, permitiendo que los robots que sobrevivieron el torneo principal a combatir en un" libre para todos "en un partido de 5 minutos. De vez en cuando hay robots demasiados para un estruendo, y varios estruendos se celebran con la parte superior contra los robots de sobrevivir compitiendo en un evento final. Durante la Temporada 5 Heavyweight Rumble (los primeros rumores de que la competencia), una esquila-off parte robot pasó por el techo y cayó Arena Lexan (inofensivo) en la audiencia. Debido a esto, el resto de los estruendos fueron cancelados debido a problemas de seguridad.
El BattleBox
El BattleBox es de 48 'x 48' Arena cuadrados destinados a proteger a los conductores, los funcionarios, y público de la metralla y la carga contra los robots. Consta de una planta de acero y con armazón de acero con paneles de paredes y techo con un plástico grueso, de policarbonato antibalas. Los equipos traen sus robots en las puertas, que están selladas después de haber salido de todos los seres humanos. Los controladores de control de sus máquinas de fuera de la arena sellado.
Riesgos de Arena
Operado por "Pulverizador Pete", los riesgos de arena están destinadas a hacer peleas más interesantes e imprevisibles, y para premiar a los conductores que pueden evitar los peligros, mientras que empujar o llevar a su oponente en ellos. Los riesgos incluyen:
• Pulverizadores: £ 150 mazos que pueden hacer un daño importante a cualquier bot que pasa por debajo de ellos. Originalmente mazos normal que causó daños mínimos, que se convirtió en mazos de 50 libras de aluminio que se separó en varias ocasiones (temporada 2) y, finalmente, se convirtió en el 150 mazos de libras (temporadas 3 y otros).
• Tiras de Spike: Las paredes de la arena se cubren con 6-pulgada de largo, puntas de acero afilado. Empujar a un oponente duro en un muro a veces se puede presentar en las espigas, inmovilizarlo.
• Spinners: Estos rápidamente los discos girando en el piso no hacer daño a un robot, pero interfiere con su conducción o de aventura por el cuarto (en función del peso). The Spinners inadvertidamente sólo afectan a la clase de peso ligero, como los robots mayor peso de clase son lo suficientemente pesadas que apenas puede pasar por encima de ellos con poca resistencia.
• Kill Sierras: The Kill sierras son sierras circulares que se levantan sobre el suelo a gran velocidad tan pronto como un robot de más de unidades de las ranuras de color rojo que las ocultan. El carburo de sierra puede arrancar en los neumáticos un bot o el chasis. En las temporadas más tarde, rojo 'tirar las hojas "se han añadido para aumentar la probabilidad de que un bot se están iniciando.
• Pistons: Introducida por primera vez en la temporada 3, los Pistons son las columnas de acero que suben y bajan desde el piso sin previo aviso. Como no están afilados o particularmente rápido, que no hacen mucho daño a los robots, pero se puede detener a un robot de carga o un flip por encima o en su lado. Los Pistons fueron eliminados para estaciones 4 y 5.
• Baquetas: Se trata de puntas de acero afiladas que salen de la pista de la Arena en grupos de seis, que sirve tanto para levantar un robot fuera de la tierra o la punción bajo su armadura si mal construidos.
• Criadores Infierno: Si un robot de unidades sobre el centro de la arena, un carnero neumáticos abrirá estas secciones de la palabra a una inclinación de 15 grados. Los criadores infierno fueron llevados a cabo en la temporada 5 para permitir más espacio para los robots para luchar.
• Tornillos: Introducida por primera vez en la temporada 3, estos dispositivos eran una modificación de las tiras de estática pico. Los tornillos fueron rotando continuamente barrenos colocados horizontalmente en el borde de la pista de la Arena. Los tornillos se destina a juntar un bot, y posiblemente arrastre más cerca de los pulverizadores debido al diseño del sacacorchos. Sin embargo, al igual que los Spinners, estos afectados la mayoría de los pesos ligeros. De hecho, apenas hace una gran diferencia en las luchas de todos, que las hacen un "arreglo cosmético" en su lugar. Para la temporada 5, los tornillos fueron actualizados para que en lugar de "empujar" en una dirección, que convergieron en el centro desde direcciones opuestas, formando una 'V' que muy a menudo tapa o robots de los daños. También se les dio dientes, para atrapar a una armadura mejor.
-------------------------------------------------------------------------------------------------------------------------------------------------------------
CONTRUCCION ROBOT ARAÑA:
INTRODUCCIÓN:
Por inquietud de un amigo me propuse realizar un robot, ya que comencé a interesarme por el mundo de los microcontroladores de microchip, y viendo el gran rendimiento y versatilidad, vi posible este proyecto. Para comenzar adquirí un poco de material y comencé el diseño de la parte electrónica y posteriormente de la mecánica, la cual me llevó un par de días en decidir como funcionaria mejor y que elementos definitivos tendría que usar, al principio pensé en usar motores DC, para que así en vez de patas tenga ruedas (que en realidad hubiese sido mucho mas fácil) pero bueno, me complique la vida queriendo usar servomotores de los que se usan en aeromodelismo/automodelismo por lo cual tuve que investigar como funcionan. Al cabo de un tiempo encontré información muy útil que me dio muchas ideas no solo para este robot si no para otro tipo de aplicaciones. Cabe mencionar que como el estilo araña seria su forma final, tuve que nada menos que capturar una araña y grabar con una cámara su movimiento y así poder llevar ese movimiento a los 3 servomotores que utilice (cada servomotor mueve 2 patas, ósea 6 patas en total).
POR QUE USAMOS SERVOMOTORES:
Una de las ventaja de los servomotores es su fuerza y que si se le esta entregando señal adecuada quedan en una posición fija, y si tratas de moverlo el servo hace fuerza contraria para mantener su posición en que se dejo (gran ventaja en comparación a los motores DC y Paso a Paso.) la única desventaja es que originalmente solo trabajan de 0° a 180° pero se pueden modificar fácilmente para que giren 360º y así se pueden utilizar como motores y se les puede controlar la velocidad y el sentido de giro.
LISTA DE COMPONENTES NECESARIOS:
3 – Resostatos de 1k. 4 – Resistencias de 10k. 3 – Resistencias de 1k. 3 – Resistencias de 220 ohmios. 1 – Regulador de voltaje 78m05. 1 – Cristal de 4mhz. 1 – PIC 16f84a (microcontrolador 84). 1 – Integrado lm324n. 3 – Leds. 3 – Fotoceldas. 3 – Servos FT-S148 o cualquier otro de marca FUTABA con un torque de unos 3Kg. 4 – Pilas AA. 1 – Pila de 9V. 2 – Capasitores Ceramicos 33pf (33 pico faladios). 1 – Capacitor Ceramico de 104f (104 faladios).
CONSTRUCCIÓN DEL CHASIS Y LAS PATAS:
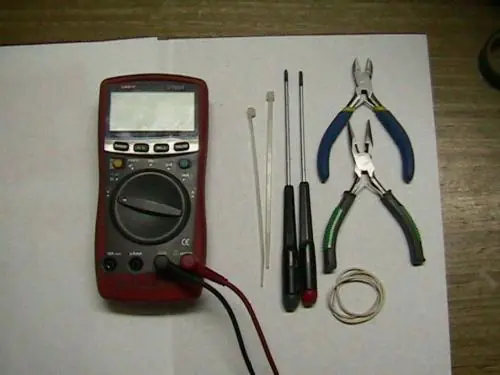
Si alguien se anima puede mejorarlo, no solo construirlo igual a este. Para comenzar iré explicando por la parte mecánica para dar lugar más tarde a la parte electrónica analógica y digital. Lo primero de todo son las herramientas necesarias para la construcción del chasis y un instrumento para medir en el caso de la electrónica, algunos de ellos se muestran en la siguiente foto:
Para la base del robot utilice un tubo de PVC estirado, obviamente un terciado delgado serviría también u otro tipo de plástico no tan grueso, para así no añadir demasiado peso adicional. Corte un pedazo de PVC en forma de rectángulo de 15cm su lado mayor y el menor de 9cm y puse los servos de tal forma que sus ejes de movimiento estuvieran en linea recta y en la mitad del rectángulo como se muestra en la foto de más abajo, además de los orificios que se marcan y distribuyen cuando estos están listos para ser montados, el detalle de los orificios no esta detallado ya que tienen que posicionarlos de manera uniforme en el rectángulo para mantener un equilibrio y estabilidad a futuro (mas adelante verán como son posicionados dentro de este rectángulo).
Como se puede apreciar solo hay dos orificios para los servomotores, esto se debe a que uno de los servos tiene que ir en forma horizontal como lo veremos mas adelante. También hay unos cachos de plástico que soportaran el servo a una altura adecuada de la placa para que todos queden al mismo nivel cuando estén montados, estos son un rectángulo de 2cm por 1cm y como se ve en la figura son 4, además de 8 tornillos con dos tuercas por tornillo que nos fijaran dos de los servos, el tercero se fijara con un amarra cable ya que es mas practico por su posición en horizontal. Los tornillos son de 1.5mm por 1 pulgada. A continuación mostraremos el servo con su cabezal redondo y el alambre que nos servirá de patas para la primera parte, lo podéis ver en la siguiente foto:
Como podéis ver tenemos un trozo de alambre de unos 25 cm de largo por 1.5mm cuadrado de sección, por cada servo se necesitan 3 tiras de esa misma medida ya que por firmeza tuve que agregarle esa cantidad ya que por el peso de este cuando esta terminado no era capaz de mantener rígidas las patas. El cabezal del servo tiene tres orificios por cada 90° y cada alambre se inserta de la manera mostrada en la siguiente foto:
Como podéis ver en la foto ya esta ensamblado en uno de los 3 orificios falta que pase por el segundo y curvar el alambre para que tenga nuestra forma deseada:

Aunque no se ve muy bien debo mencionar que el alambre pasa por los dos orificios y sale por la parte delantera del cabezal. En la siguiente foto ya se ve terminado con sus tres alambres por cabezal y envueltos con hincha aisladora para darle rigidez.

En la siguiente foto ya esta montado en el eje con una de sus dos patas terminadas, así deben quedar dos de los 3 servomotores:

El 3° servo los alambres y posición de estos deben quedar como se muestra en la siguiente foto:

Si se fijan bien en la foto de arriba este es el servo que ira en la parte del medio y sus alambres están en otra dirección, este servo es el que se encarga de inclinar todo el cuerpo de la araña mientras los otros dos hacen que se desplace. Sin este servo no existe movimiento alguno ya que para poder avanzar hay que inclinar el peso hacia un lado para mantener el equilibrio y así poder alanzar con el otro pie, en este caso pasa algo similar, necesito inclinar el eje de equilibrio para que los dos servos restantes puedan hacer que la base completa se desplace. Como se ve en la siguiente foto ya tenemos los tres servos con sus respectivas cabezas y patas terminadas lista para ser montadas al final del proyecto cuando todo este en su sitio:
COMENZAMOS EL MONTAJE:
En la siguiente foto se puede ver el primer servo en su sitio con sus tornillos y soportes de plástico pequeños, fíjense que el eje de giro se encuentra en la mitad de la base marcado con una línea:
En la siguiente foto tenemos ya montado el segundo servo, que se monta de forma igual al anterior:

En la siguiente foto se ve la parte superior en donde esta anclado el servo con sus tuercas que mantendrán el servo en su posición:
En la siguiente foto se puede ver el 3º servo que va en forma horizontal con sus amarra cable como sujeción:
En la siguiente foto se observa con mas detalle el posicionamiento de los servos, observe que el servo que tiene el número 1 su cable de control ha sido pasado por el orificio que esta a un costado:
Aquí es importante que tengan cada servo enumerado como se puede ver en la foto de arriba, en una esquina el servo 0 en la otra el 2 y en el medio el 1 también se debe marcar el terminal de conexión del servo con el numero que corresponda, ya que esto nos servirá para entender su conexionado posterior y para el que entienda de programación sepa en el programa de movimiento que servo es el que se debe mover.
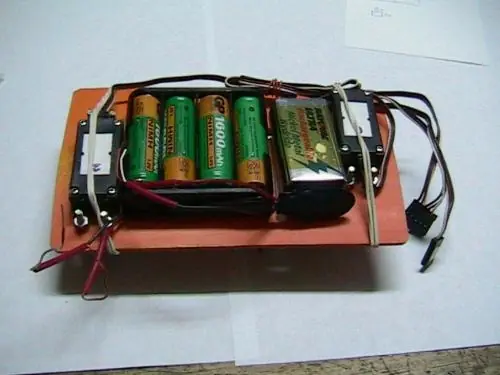
LA ALIMENTACIÓN ELÉCTRICA:
Para mover los servos usaremos 4 pilas AA de 1,5V. cada una y para la parte electrónica analógica y digital una pila de 9V. que limitaremos a 5V. con un regulador de voltaje.
Y no olvidéis comprar también un porta-pilas para 4 pilas AA y un conector para la pila de 9V, como veis en al foto superior, así podremos posicionar dichos elementos más fácilmente en nuestro robot, para sujetar la placa que contendrá el circuito yo usaré 2 gomas elásticas como podéis ver en la foto:
EL CIRCUITO:
Como podéis ver más abajo está el esquema electrónico que se encarga de verificar la fuente de luz, que en este caso usamos 3 sensores de luz para direcionar entre Izquierda, Centro y Derecha, y que son llevados al microcontrolador (16F84A) que se encargará de procesar y enviar las ordenes a los servomotores para poder hacer lo que se pretende, que es mover la araña en el sentido de la fuente de luz.
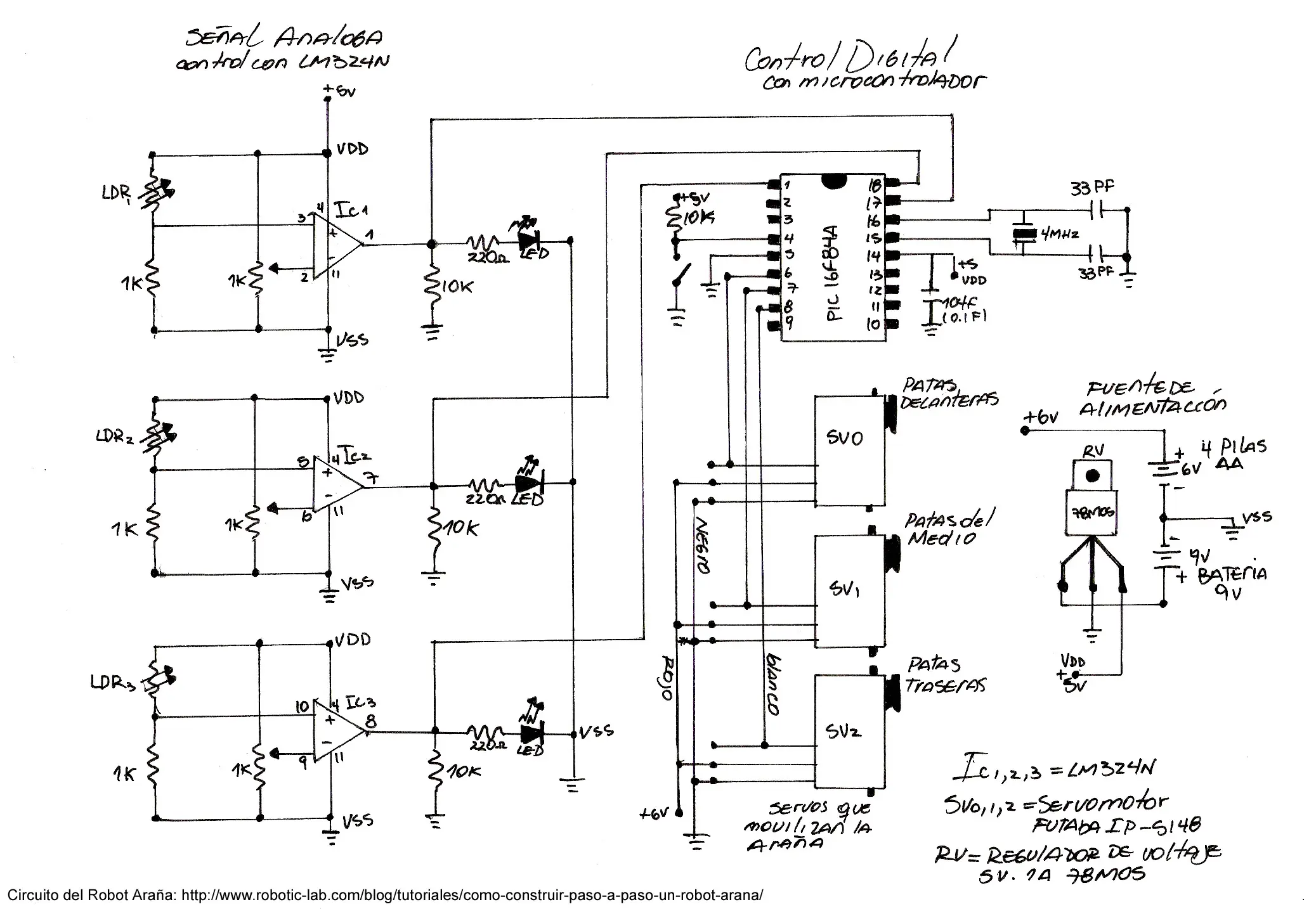
En el dibujo de arriba esta detallada cada sección de todo el conjunto, la parte Analógica que se encarga de enviar la señal al microcontrolador (Control digital) su fuente de alimentación y regulación y finalmente la parte de potencia que son los servomotores. Voy a explicar cada una de ellas para que entiendan como funciona cada parte del circuito. Comenzando con la parte analógica vemos en el costado izquierdo superior que tenemos 3 LDR’s que nos darán la posición de la fuente de luz, y son puestos en un circuito integrado que esta configurado como comprobador de voltaje y que para un LDR entendemos que: Al aplicarle luz a la foto resistencia su valor disminuye ingresando por la entrada negativa del operacional un valor que se compara por el de la resistencia variable de 1k ohm cuando este valor es igual a la salida del operacional tenemos un alto (3,3V. aproximadamente) y cuando no existe luz este valor de voltaje es diferente por el cual la salida de ese operacional es de 0 Voltios. A la salida de cada operacional se conecta diodos LED que se encargan de avisarnos el estado de las entradas y así poder verificar y ajustar con las resistencias variables de 1k ohm el valor de luz o mejor dicho la sensibilidad a la luz que queremos que funcione nuestro robot, si se encuentra encendido algún led es por que esta llegando luz de alguna fuente del ambiente, para dejarlo apagado solo se tiene que ajustar la resistencia de 1k ohm hasta que se apague. Debo mencionar que estos indicadores deben estar apagados en un comienzo para así al aplicarles luz comience a funcionar el robot según la dirección del rayo de luz. Aquí podemos sacar en conclusión que para los 3 LDR’s tenemos 8 posibles combinaciones que nos darán los diferentes estados que serán procesados por el microcrontolador, esta tabla se muestra en la siguiente imagen:

Ya sabemos que el 0 corresponde a un 0 lógico y los 3,3V. a un 1 lógico por lo que tenemos una tabla con todas las posibles combinaciones y su respectivo movimiento que llevara a cabo finalmente. En la parte de control Digital se toman estos valores y según nuestra tabla, se le enviaran las señales al servo que corresponda para hacer un movimiento en particular, y para entender que tipo de señal se le debe enviar, detallare a continuación como funciona un servomotor:
Como se muestra en la figura y como mencioné anteriormente el servo tiene una movilidad de 180° y funciona con lo que se conoce como modulación por ancho de pulsos o PWM. Osea este servo que es dE la marca FUTABA de Radiocontrol, funciona a 50Hz, o sea en un segundo le son enviados 50 pulsos, y con un simple calculo se puede dividir 1/50 y nos dará 20miliseg el ancho de pulso se utilizara para el trabajo del movimiento de este: Osea trabajando en este pequeño intervalo, podemos poner en un ángulo a nuestro antojo el servomotor y que se quede allí hasta que cambiemos ese pulso por otro. Para 0° tenemos que tener un pulso de 0,2 mili segundos y el resto un pulso bajo hasta los 20 milisegundos, esto repetidamente 50 veces nos da los 50 Hz y por consecuencia el servo en la posición 0° como se muestra en la figura. Para 90° tenemos que aplicar un pulso de 1,5 mili segundos y el resto en pulso bajo hasta los 20 milisegundos, esto repetidamente por 50 Hz nos dará la posición 90°, también mostrado en la figura. Y para 180 ° tenemos que aplicar un pulso de 2,2 mili segundos y el resto en pulso bajo hasta los 20 milisegundos, esto repetidamente por 50 Hz nos dará la posición 180°. Para este caso en particular se uso como centro 90° y se calcularon matemáticamente los pulsos para 66,5° y 112,5° que serán los 3 ángulos usados para que camine nuestra araña.
En el programa en ASM se detallan los tiempos de estos pulsos como asi las rutinas usadas para el movimiento podéis verlos en este documento de texto:
Debo mencionar que para aumentar la rapidez entre servo y servo en vez de repetir 50 veces el movimiento por servo lo disminuí a 8 y para centrarlo a 13 veces. No pretendo explicar el programa ya que seria muy largo, pero bien resumido el programa analiza los niveles lógicos de los sensores LDR que son 8 para así ejecutar una rutina de movimiento X y así poder llevar los 3 servos en una dirección X, este movimiento esta comprobado y posteriormente será puesto un video con su desempeño.
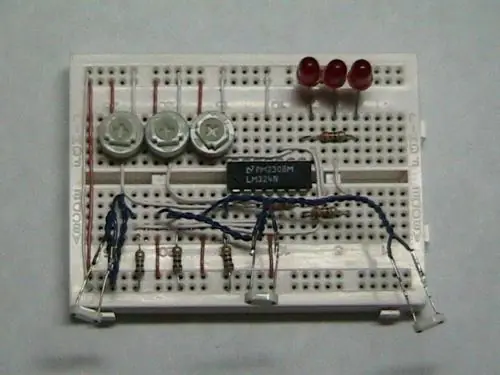
Aquí mostramos el ensamble de la parte analógica en un protoboard y que usa el circuito integrado para llevar la información de los LDR a niveles lógicos que el microcontrolador procesara a futuro, también están las LDR los Diodos LED que indicaran cuando se este alumbrando cada LDR.
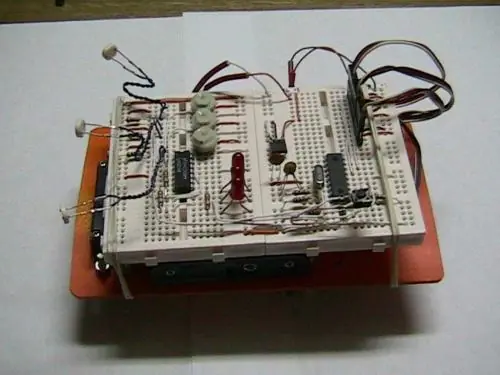
Aquí se encuentra ensamblado el circuito digital de proceso con su microcontrolador y sus accesorios como la pequeña regleta de conexionado donde irán los servos conectados, y la fuente regulada que se encarga de pasar los 9 volt a los 5 volt de trabajo del Microcontrolador y que también será usado para la parte analógica
Aquí ya esta ensamblado los dos protoboard y unidas las señales de control como las fuentes tal como salían en el esquema del circuito. solo queda ponerlo sobre la base y conectar los servos como se muestra en la siguiente Figura. Un de talle importante es que la parte que tiene los sensores (LDR), debe ir sobre el servo con la numeración 0.
Aquí ya esta ensamblado casi por completo el circuito.
Solo nos queda colocar en su posición cada pata de nuestra araña (Ver siguiente Figura.).
Y ya estamos listos

Ya esta terminada nuestra araña solo queda programar el Microcontrolador con un programador para PIC y ver si responde a nuestro mandato de luz.
Espero la disfruten! Aquí tenéis un vídeo en el que se puede ver como reacciona a la luz:
link: http://www.videos-star.com/watch.php?video=6EaY60Ew
-------------------------------------------------------------------------------------------------------------------------------------------------------------
Y bueno aqui termina este mega post de robots espero que les alla gustado mucho.Luego añadire imagenes de robot.Comenten y voten
Saludos a todos
¿Que són?
Un robot es una entidad virtual o mecánica artificial. En la práctica, esto es por lo general un sistema electromecánico que, por su apariencia o sus movimientos, ofrece la sensación de tener un propósito propio. La palabra robot puede referirse tanto a mecanismos físicos como a sistemas virtuales de software, aunque suele aludirse a los segundos con el término de bots.
No hay un consenso sobre qué máquinas pueden ser consideradas robots, pero sí existe un acuerdo general entre los expertos y el público sobre que los robots tienden a hacer parte o todo lo que sigue: moverse, hacer funcionar un brazo mecánico, sentir y manipular su entorno y mostrar un comportamiento inteligente, especialmente si ése comportamiento imita al de los humanos o a otros animales.
Aunque las historias sobre ayudantes y acompañantes artificiales, así como los intentos de crearlos, tienen una larga historia, las máquinas totalmente autónomas no aparecieron hasta el siglo XX. El primer robot programable y dirigido de forma digital, el Unimate, fue instalado en 1961 para levantar piezas calientes de matel de una máquina de tinte y colocarlas.
Por lo general, la gente reacciona de forma positiva ante los robots con los que se encuentra. Los robots domésticos para la limpieza y mantenimiento del hogar son cada vez más comunes en los hogares. No obstante, existe una cierta ansiedad sobre el impacto económico de la automatización y la amenaza del armamento robótico, una ansiedad que se ve reflejada en el retrato a menudo perverso y malvado de robots presentes en obras de la cultura popular. Comparados con sus colegas de ficción, los robots reales siguen siendo limitados.
Los primeros autómatas
En el siglo IV antes de Cristo, el matemático griego Arquitas de Tarento construyó un ave mecánica que funcionaba con vapor y al que llamó "La paloma". También el ingeniero Herón de Alejandría (10-70 d. C.) creó numerosos dispositivos automáticos que los usuarios podían modificar, y describió máquinas accionadas por presión de aire, vapor y agua.Por su parte, el estudioso chino Su Song levantó una torre de reloj en 1088 con figuras mecánicas que daban las campanadas de las horas.
Al Jazarií (1136–1206), un inventor musulmán de la dinastía Artuqid, diseñó y construyó una serie de máquinas automatizadas, entre los que había útiles de cocina, autómatas musicales que funcionaban con agua, y en 1206 los primeros robots humanoides programables. Las máquinas tenían el aspecto de cuatro músicos a bordo de un bote en un lago, entreteniendo a los invitados en las fiestas reales. Su mecanismo tenía un tambor programable con clavijas que chocaban con pequeñas palancas que accionaban instrumentos de percusión. Podían cambiarse los ritmos y patrones que tocaba el tamborilero moviendo las clavijas.
Desarrollo moderno
El artesano japonés Hisashige Tanaka (1799–1881), conocido como el "Edison japonés", creó una serie de juguetes mecánicos extremadamente complejos, algunos de los cuales servían té, disparaban flechas retiradas de un carcaj e incluso trazaban un kanji (caracter japonés).
Por otra parte, desde la generalización del uso de la tecnología en procesos de producción con la Revolución Industrial se intentó la construcción de dispositivos automáticos que ayudasen o sustituyesen al hombre. Entre ellos destacaron los Jaquemarts, muñecos de dos o más posiciones que golpean campanas accionados por mecanismos de relojería china y japonesa.
Robots equipados con una sola rueda fueron utilizados para llevar a cabo investigaciones sobre conducta, navegación y planeo de ruta. Cuando estuvieron listos para intentar nuevamente con los robots caminantes, comenzaron con pequeños hexápodos y otros tipos de robots de múltiples patas. Estos robots imitaban insectos y artrópodos en funciones y forma. Como se ha hecho notar anteriormente, la tendencia se dirige hacia ese tipo de cuerpos que ofrecen gran flexibilidad y han probado adaptabilidad a cualquier ambiente.
Con más de 4 piernas, estos robots son estáticamente estables lo que hace que el trabajar con ellos sea más sencillo. Sólo recientemente se han hecho progresos hacia los robots con locomoción bípeda.
En el sentido común de un autómata, el mayor robot en el mundo tendría que ser el Maeslantkering, una barrera para tormentas del Plan Delta en los Países Bajos construida en los años 1990, la cual se cierra automáticamente cuando es necesario. Sin embargo, esta estructura no satisface los requerimientos de movilidad o generalidad.
En 2002 Honda y Sony, comenzaron a vender comercialmente robots humanoides como “mascotas”. Los robots con forma de perro o de serpiente se encuentran, sin embargo, en una fase de producción muy amplia, el ejemplo más notorio ha sido Aibo de Sony.
La robótica en la actualidad
------------------------------------------------------------------------------------------------------------------------------------------------------------
En la actualidad, los robots comerciales e industriales son ampliamente utilizados, y realizan tareas de forma más exacta o más barata que los humanos. También se les utiliza en trabajos demasiado sucios, peligrosos o tediosos para los humanos. Los robots son muy utilizados en plantas de manufactura, montaje y embalaje, en transporte, en exploraciones en la Tierra y en el espacio, cirugía, armamento, investigación en laboratorios y en la producción en masa de bienes industriales o de consumo.
Otras aplicaciones incluyen la limpieza de residuos tóxicos, minería, búsqueda y rescate de personas y localización de minas terrestres.
Expo 2005, Nagakute (Aichi)
Existe una gran esperanza, especialmente en Japón, de que el cuidado del hogar para la población de edad avanzada pueda ser desempeñado por robots.
Los robots parecen estar abaratándose y reduciendo su tamaño, una tendencia relacionada con la miniaturización de los componentes electrónicos que se utilizan para controlarlos. Además, muchos robots son diseñados en simuladores mucho antes de construirse y de que interactúen con ambientes físicos reales. Un buen ejemplo de esto es el equipo Spiritual Machine,
un equipo de 5 robots desarrollado totalmente en un ambiente virtual para jugar al fútbol en la liga mundial de la F.I.R.A.
Además de los campos mencionados, hay modelos trabajando en el sector educativo, servicios (por ejemplo, en lugar de recepcionistas humanos[18] o vigilancia) y tareas de búsqueda y rescate.
Usos medicos
Recientemente, se ha logrado un gran avance en los robots dedicados a la medicina,
con dos compañías en particular, Computer Motion e Intuitive Surgical, que han recibido la aprobación regulatoria en América del Norte, Europa y Asia para que sus robots sean utilizados en procedimientos de cirugía invasiva mínima. Desde la compra de Computer Motion (creador del robot Zeus) por Intuitive Surgical, se han desarrollado ya dos modelos de robot daVinci por esta última. En la actualidad, existen más de 800 robots quirúrgicos daVinci en el mundo, con aplicaciones en Urología, Ginecología, Cirugía general, Cirugía Pediátrica, Cirugía Torácica, Cirugía Cardíaca y ORL. También la automatización de laboratorios es un área en crecimiento. Aquí, los robots son utilizados para transportar muestras biológicas o químicas entre instrumentos tales como incubadoras, manejadores de líquidos y lectores. Otros lugares donde los robots están reemplazando a los humanos son la exploración del fondo oceánico y exploración espacial. Para esas tareas se suele recurrir a robots de tipo artrópodo.
Modelos de vuelo
En fases iniciales de desarrollo hay robots alados experimentales y otros ejemplos que explotan el biomimetismo. Se espera que los así llamados nanomotores y cables inteligentes simplifiquen drásticamente el poder de locomoción, mientras que la estabilización en vuelo parece haber sido mejorada substancialmente por giroscopios extremadamente pequeños.
Modelos militares
Un impulsor muy significativo de este tipo de investigaciones es el desarrollo de equipos de espionaje militar.
Destacan también el éxito de las bombas inteligentes y UCAVs en los conflictos armados, sin olvidar el empleo de sistemas robóticos para la retirada de minas antipersonales.
Arquitectura de los Robots
Existen diferentes tipos y clases de robots, entre ellos con forma humana, de animales, de plantas o incluso de elementos arquitectónicos pero todos se diferencian por sus capacidades y se clasifican en 4 formas:
1. Androides: robots con forma humana. Imitan el comportamiento de las personas, su utilidad en la actualidad es de solo experimentación. La principal limitante de este modelo es la implementación del equilibrio a la hora del desplazamiento, pues es bípedo.
2. Móviles: se desplazan mediante una plataforma rodante (ruedas); estos robots aseguran el transporte de piezas de un punto a otro.
3. Zoomórficos: es un sistema de locomoción imitando a los animales. La aplicación de estos robots sirve, sobre todo, para el estudio de volcanes y exploración espacial.
4. Poliarticulados: mueven sus extremidades con pocos grados de libertad. Su principal utilidad es industrial, para desplazar elementos que requieren cuidados.
Proyectos en marcha
* Proyecto Autómata Abierto. El propósito de este proyecto es desarrollar software modular y componentes electrónicos, desde los cuales sea posible ensamblar un robot móvil basado en una computadora personal que pueda ser utilizado en ambientes de casas u oficinas. Todo el código fuente es distribuido bajos los términos de la Licencia Pública General (GNU).
* ASIMO. Proyecto de robot humanoides de Honda.
* Dean Kamen, fundador de FIRST y de la Sociedad Americana de Ingenieros Mecánicos (ASME), ha creado una Competencia Robótica multinacional que reúne a profesionales y jóvenes para resolver problemas de diseño de ingeniería de manera competitiva. En 2003, el torneo contó con más de 20.000 estudiantes en más de 800 equipos en 24 competiciones. Los equipos vienen de Canadá, Brasil, Reino Unido y Estados Unidos. A diferencia de las competiciones de los robots de lucha sumo que se celebran regularmente en algunos lugares o las peleas de ficción de “Battlebots“ transmitidas por televisión, estos torneos incluyen la construcción de un robot.
Los robots en la ficción
Mitología
Muchas mitologías antiguas tratan la idea de los humanos artificiales. En la mitología clásica, se dice que Cadmo sembró dientes de dragón que se convertían en soldados, y Galatea, la estatua de Pigmalión, cobró vida. También el dios griego de los herreros, Hefesto (Vulcano para los romanos) creó sirvientes mecánicos inteligentes, otros hechos de oro e incluso mesas que se podían mover por sí mismas. Algunos de estos autómatas ayudan al dios a forjar la armadura de Aquiles, según la Ilíada[20] Aunque, por supuesto, no se describe a esas máquinas como "robots" o como "androides", son en cualquier caso dispositivos mecánicos de apariencia humana.
Una leyenda hebrea habla del Golem, una estatua animada por la magia cabalística. Por su parte, las leyendas de los Inuit describen al Tupilaq (o Tupilak), que un mago puede crear para cazar y asesinar a un enemigo. Sin embargo, emplear un Tupilaq para este fin puede ser una espada de doble filo, ya que la víctima puede detener el ataque del Tupilaq y reprogramarlo con magia para que busque y destruya a su creador.
Litertura
Ya en 1817, en un cuento de Hoffmann llamado El Coco, aparece una mujer que parecía una muñeca mecánica, y en la obra de Edward S. Ellis de 1865 El Hombre de Vapor de las Praderas se expresa la fascinación americana por la industrialización.
Como se indicaba más arriba, la primera obra en utilizar la palabra robot fue la obra teatral R.U.R. de Čapek,(escrita en colaboración con su hermano Josef en 1920; representada por primera vez en 1921; escenificada en Nueva York en 1922. La edición en inglés se publicó en 1923).
La obra comienza en una fábrica que construye personas artificiales llamadas robots, pero están más cerca del concepto moderno de androide o clon, en el sentido de que se trata de criaturas que pueden confundirse con humanos. Pueden pensar por sí mismos, aunque parecen felices de servir. En cuestión está si los robos están siendo explotados, así como las consecuencias por su tratamiento.
El autor más prolífico de historias sobre robots fue Isaac Asimov (1920-1992), que colocó los robots y su interacción con la sociedad en el centro de muchos de sus libros.White, Michael (2005). Isaac Asimov: a life of the grand master of science fiction (en inglés). Carroll & Graf, pp. 1-2. ISBN 0786715189.</ref>[21] Este autor consideró seriamente la serie ideal de instrucciones que debería darse a los robots para reducir el peligro que éstos representaban para los humanos. Así llegó a formular sus Tres Leyes de la Robótica: Ningún robot causará daño a un ser humano o permitirá, con su inacción, que un ser humano sufra daño; todo robot obedecerá las órdenes que le den los seres humanos, a menos que esas órdenes entren en conflicto con la primera ley; y todo robot debe proteger su propia existencia, siempre que esa protección no entre en conflicto con la primera o la segunda ley.
Esas tres leyes se introdujeron por primera vez en su relato corto de 1942 Círculo Vicioso, aunque habían sido esbozadas en algunos textos anteriores. Más tarde, Asimov añadió la ley de Cero: "Ningún robot causará daño a la humanidad ni permitirá, con su inacción que la humanidad sufra daño". El resto de las leyes se modificaron para ajustarse a este añadido.
Según el Oxford English Dictionary, el principio del relato breve ¡Mentiroso! de 1941 contiene el primer uso registrado de la palabra robótica. El autor no fue consciente de esto en un principio, y asumió que la palabra ya existía por su analogía con mecánica, hidráulica y otros términos similares que se refieren a ramas aplicadas del conocimiento.
Cine y televisión
El tono económico y filosófico iniciado por R.U.R. sería desarrollado más tarde por la película Metrópolis, y las populares Blade Runner (1982) o The Terminator (1984).
Existen muchas películas sobre robots, como Inteligencia Artificial de Steven Spielberg, o las dos películas basadas en los relatos de Isaac Asimov, Yo, Robot y El hombre bicentenario, asi también como Cortocircuito y la versión de Disney: Wall-E.
En televisión, existen series muy populares como Robot Wars y Battlebots, de batallas de estilo sumo entre robots.
También hay una pelicula con Bruce Willis nombrada "Identidad Sustituta"
Cuestiones éticas
Existe la preocupación de que los robots puedan desplazar o competir con los humanos . Las leyes o reglas que pudieran o debieran ser aplicadas a los robots u otros “entes autónomos” en cooperación o competencia con humanos si algún día se logra alcanzar la tecnología suficiente como para hacerlos inteligentes y conscientes de sí mismos, han estimulado las investigaciones macroeconómicas de este tipo de competencia, notablemente construido por Alessandro Acquisti basándose en un trabajo anterior de John von Neumann.
Actualmente, no es posible aplicar las Tres leyes de la robótica, dado que los robots no tienen capacidad para comprender su significado, evaluar las situaciones de riesgo tanto para los humanos como para ellos mismos o resolver los conflictos que se podrían dar entre estas leyes.
Entender y aplicar lo anteriormente expuesto requeriría verdadera inteligencia y consciencia del medio circundante, así como de sí mismo, por parte del robot, algo que a pesar de los grandes avances tecnológicos de la era moderna no se ha llegado
El impacto de los robots en el plano laboral
Muchas grandes empresas, como Intel, Sony, General Motors, Dell, han implementado en sus líneas de producción unidades robóticas para desempeñar tareas que por lo general hubiesen desempeñado trabajadores de carne y hueso en épocas anteriores.
Esto ha causado una agilización en los procesos realizados, así como un mayor ahorro de recursos, al disponer de máquinas que pueden desempeñar las funciones de cierta cantidad de empleados a un costo relativamente menor y con un grado mayor de eficiencia, mejorando notablemente el rendimiento general y las ganancias de la empresa, así como la calidad de los productos ofrecidos.
Pero, por otro lado, ha suscitado y mantenido inquietudes entre diversos grupos por su impacto en la tasa de empleos disponibles, así como su repercusión directa en las personas desplazadas. Dicha controversia ha abarcado el aspecto de la seguridad, llamando la atención de casos como el ocurrido en Jackson, Míchigan, el 21 de julio de 1984 donde un robot aplastó a un trabajador contra una barra de protección en la que aparentemente fue la primera muerte relacionada con un robot en los EE. UU.
Debido a esto se ha llamado la atención sobre la ética en el diseño y construcción de los robots, así como la necesidad de contar con lineamientos claros de seguridad que garanticen una correcta interacción entre humanos y máquinas.
Los robots en los deportes
Hay un juego considerado deporte de peleas de robots en una arena, estos robots tienen brazos, ganchos o cualquier artefacto para defenderse o ganarle a los demas, estas peles se transmiten en BATTLEBOTS un programa donde te dan las peleas de robots, hechas en California o Inglaterra
Clases de peso
Los Robots en los torneos de BattleBots fueron separados en cuatro categorías de peso. Los límites de peso se incrementó ligeramente con el tiempo. En los torneos de final de las clases fueron:
• Ligero: 60 libras (27 kilogramos)
• Medio: 120 libras (54 kilogramos)
• Heavyweight: 220 libras (100 kilogramos)
• Superheavyweight: 340 libras (154 kilogramos)
Partidos
Los partidos son tres minutos de duración. Durante un partido, dos robots hacen todo lo posible para destruir unos a otros con los medios disponibles.
Sólo hay dos acontecimientos que causan que el encuentro se hizo una pausa y las personas entrar en el BattleBox. Uno de ellos es el caso de que los robots están pegados y no se puede separar o que ambos tienen al mismo tiempo de la inactividad. El otro escenario es que uno o ambos 'contra los robots tienen atrapados en el fuego. En ese caso, las personas que entran en la BattleBox están equipadas con un extintor de incendios.
Si un robot es incapaz de moverse durante treinta segundos, porque es muy dañado o se ha quedado atascado en la arena riesgos, es declarado fuera de combate. El conductor también puede llamar a un "tap-out" para perder el partido si su robot está a punto de ser destruida. Esto termina el partido diez segundos después, el controlador de oposición es "pidió" (pero no ordena) a no atacar durante los diez segundo recuento.
En aproximadamente la mitad de los partidos, los dos robots sobrevivir a los tres minutos, en ese momento, tres jueces distribuirá un total de 45 puntos (15 puntos de un juez, 5 puntos por cada juez por cada categoría) en tres categorías. El robot con el puntaje más alto gana. Las categorías son a juzgar la agresión, la estrategia, y el daño. Un robot que queda atrás de forma segura de su oponente no tendrá muchos puntos de la agresión, uno en que la lucha contra todo el tiempo, sin embargo, la voluntad. La categoría de estrategia es de lo bien que un robot explota las debilidades de su oponente, protege su propia y se ocupa de los peligros. Un robot de conducción en las sierras matar perderá puntos aquí, a menos que haya una buena razón para hacerlo, mientras que un robot que es capaz de atacar los puntos débiles de su oponente ganará puntos. La categoría de daños es de cuánto daño puede manejar el robot a su oponente, mientras que permanecen intactas en sí.
El ganador se mueve en, el perdedor es eliminado del torneo.
Al final del torneo, una serie de "retumba" o "rondas de cuerpo a cuerpo 'se los realiza normalmente en cada categoría de peso, permitiendo que los robots que sobrevivieron el torneo principal a combatir en un" libre para todos "en un partido de 5 minutos. De vez en cuando hay robots demasiados para un estruendo, y varios estruendos se celebran con la parte superior contra los robots de sobrevivir compitiendo en un evento final. Durante la Temporada 5 Heavyweight Rumble (los primeros rumores de que la competencia), una esquila-off parte robot pasó por el techo y cayó Arena Lexan (inofensivo) en la audiencia. Debido a esto, el resto de los estruendos fueron cancelados debido a problemas de seguridad.
El BattleBox
El BattleBox es de 48 'x 48' Arena cuadrados destinados a proteger a los conductores, los funcionarios, y público de la metralla y la carga contra los robots. Consta de una planta de acero y con armazón de acero con paneles de paredes y techo con un plástico grueso, de policarbonato antibalas. Los equipos traen sus robots en las puertas, que están selladas después de haber salido de todos los seres humanos. Los controladores de control de sus máquinas de fuera de la arena sellado.
Riesgos de Arena
Operado por "Pulverizador Pete", los riesgos de arena están destinadas a hacer peleas más interesantes e imprevisibles, y para premiar a los conductores que pueden evitar los peligros, mientras que empujar o llevar a su oponente en ellos. Los riesgos incluyen:
• Pulverizadores: £ 150 mazos que pueden hacer un daño importante a cualquier bot que pasa por debajo de ellos. Originalmente mazos normal que causó daños mínimos, que se convirtió en mazos de 50 libras de aluminio que se separó en varias ocasiones (temporada 2) y, finalmente, se convirtió en el 150 mazos de libras (temporadas 3 y otros).
• Tiras de Spike: Las paredes de la arena se cubren con 6-pulgada de largo, puntas de acero afilado. Empujar a un oponente duro en un muro a veces se puede presentar en las espigas, inmovilizarlo.
• Spinners: Estos rápidamente los discos girando en el piso no hacer daño a un robot, pero interfiere con su conducción o de aventura por el cuarto (en función del peso). The Spinners inadvertidamente sólo afectan a la clase de peso ligero, como los robots mayor peso de clase son lo suficientemente pesadas que apenas puede pasar por encima de ellos con poca resistencia.
• Kill Sierras: The Kill sierras son sierras circulares que se levantan sobre el suelo a gran velocidad tan pronto como un robot de más de unidades de las ranuras de color rojo que las ocultan. El carburo de sierra puede arrancar en los neumáticos un bot o el chasis. En las temporadas más tarde, rojo 'tirar las hojas "se han añadido para aumentar la probabilidad de que un bot se están iniciando.
• Pistons: Introducida por primera vez en la temporada 3, los Pistons son las columnas de acero que suben y bajan desde el piso sin previo aviso. Como no están afilados o particularmente rápido, que no hacen mucho daño a los robots, pero se puede detener a un robot de carga o un flip por encima o en su lado. Los Pistons fueron eliminados para estaciones 4 y 5.
• Baquetas: Se trata de puntas de acero afiladas que salen de la pista de la Arena en grupos de seis, que sirve tanto para levantar un robot fuera de la tierra o la punción bajo su armadura si mal construidos.
• Criadores Infierno: Si un robot de unidades sobre el centro de la arena, un carnero neumáticos abrirá estas secciones de la palabra a una inclinación de 15 grados. Los criadores infierno fueron llevados a cabo en la temporada 5 para permitir más espacio para los robots para luchar.
• Tornillos: Introducida por primera vez en la temporada 3, estos dispositivos eran una modificación de las tiras de estática pico. Los tornillos fueron rotando continuamente barrenos colocados horizontalmente en el borde de la pista de la Arena. Los tornillos se destina a juntar un bot, y posiblemente arrastre más cerca de los pulverizadores debido al diseño del sacacorchos. Sin embargo, al igual que los Spinners, estos afectados la mayoría de los pesos ligeros. De hecho, apenas hace una gran diferencia en las luchas de todos, que las hacen un "arreglo cosmético" en su lugar. Para la temporada 5, los tornillos fueron actualizados para que en lugar de "empujar" en una dirección, que convergieron en el centro desde direcciones opuestas, formando una 'V' que muy a menudo tapa o robots de los daños. También se les dio dientes, para atrapar a una armadura mejor.
-------------------------------------------------------------------------------------------------------------------------------------------------------------
CONTRUCCION ROBOT ARAÑA:
INTRODUCCIÓN:
Por inquietud de un amigo me propuse realizar un robot, ya que comencé a interesarme por el mundo de los microcontroladores de microchip, y viendo el gran rendimiento y versatilidad, vi posible este proyecto. Para comenzar adquirí un poco de material y comencé el diseño de la parte electrónica y posteriormente de la mecánica, la cual me llevó un par de días en decidir como funcionaria mejor y que elementos definitivos tendría que usar, al principio pensé en usar motores DC, para que así en vez de patas tenga ruedas (que en realidad hubiese sido mucho mas fácil) pero bueno, me complique la vida queriendo usar servomotores de los que se usan en aeromodelismo/automodelismo por lo cual tuve que investigar como funcionan. Al cabo de un tiempo encontré información muy útil que me dio muchas ideas no solo para este robot si no para otro tipo de aplicaciones. Cabe mencionar que como el estilo araña seria su forma final, tuve que nada menos que capturar una araña y grabar con una cámara su movimiento y así poder llevar ese movimiento a los 3 servomotores que utilice (cada servomotor mueve 2 patas, ósea 6 patas en total).
POR QUE USAMOS SERVOMOTORES:
Una de las ventaja de los servomotores es su fuerza y que si se le esta entregando señal adecuada quedan en una posición fija, y si tratas de moverlo el servo hace fuerza contraria para mantener su posición en que se dejo (gran ventaja en comparación a los motores DC y Paso a Paso.) la única desventaja es que originalmente solo trabajan de 0° a 180° pero se pueden modificar fácilmente para que giren 360º y así se pueden utilizar como motores y se les puede controlar la velocidad y el sentido de giro.
LISTA DE COMPONENTES NECESARIOS:
3 – Resostatos de 1k. 4 – Resistencias de 10k. 3 – Resistencias de 1k. 3 – Resistencias de 220 ohmios. 1 – Regulador de voltaje 78m05. 1 – Cristal de 4mhz. 1 – PIC 16f84a (microcontrolador 84). 1 – Integrado lm324n. 3 – Leds. 3 – Fotoceldas. 3 – Servos FT-S148 o cualquier otro de marca FUTABA con un torque de unos 3Kg. 4 – Pilas AA. 1 – Pila de 9V. 2 – Capasitores Ceramicos 33pf (33 pico faladios). 1 – Capacitor Ceramico de 104f (104 faladios).
CONSTRUCCIÓN DEL CHASIS Y LAS PATAS:
Si alguien se anima puede mejorarlo, no solo construirlo igual a este. Para comenzar iré explicando por la parte mecánica para dar lugar más tarde a la parte electrónica analógica y digital. Lo primero de todo son las herramientas necesarias para la construcción del chasis y un instrumento para medir en el caso de la electrónica, algunos de ellos se muestran en la siguiente foto:
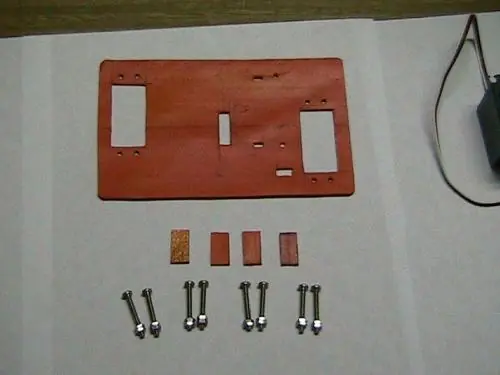
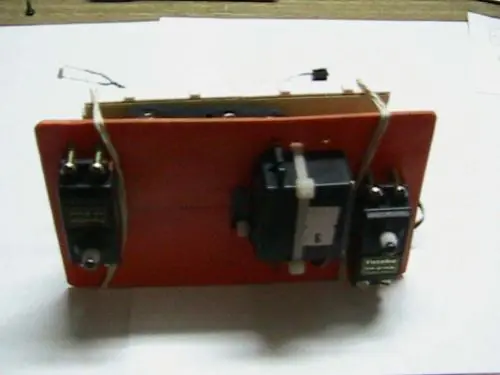
Para la base del robot utilice un tubo de PVC estirado, obviamente un terciado delgado serviría también u otro tipo de plástico no tan grueso, para así no añadir demasiado peso adicional. Corte un pedazo de PVC en forma de rectángulo de 15cm su lado mayor y el menor de 9cm y puse los servos de tal forma que sus ejes de movimiento estuvieran en linea recta y en la mitad del rectángulo como se muestra en la foto de más abajo, además de los orificios que se marcan y distribuyen cuando estos están listos para ser montados, el detalle de los orificios no esta detallado ya que tienen que posicionarlos de manera uniforme en el rectángulo para mantener un equilibrio y estabilidad a futuro (mas adelante verán como son posicionados dentro de este rectángulo).
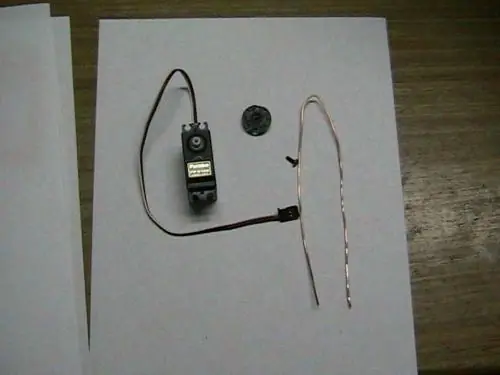
Como se puede apreciar solo hay dos orificios para los servomotores, esto se debe a que uno de los servos tiene que ir en forma horizontal como lo veremos mas adelante. También hay unos cachos de plástico que soportaran el servo a una altura adecuada de la placa para que todos queden al mismo nivel cuando estén montados, estos son un rectángulo de 2cm por 1cm y como se ve en la figura son 4, además de 8 tornillos con dos tuercas por tornillo que nos fijaran dos de los servos, el tercero se fijara con un amarra cable ya que es mas practico por su posición en horizontal. Los tornillos son de 1.5mm por 1 pulgada. A continuación mostraremos el servo con su cabezal redondo y el alambre que nos servirá de patas para la primera parte, lo podéis ver en la siguiente foto:
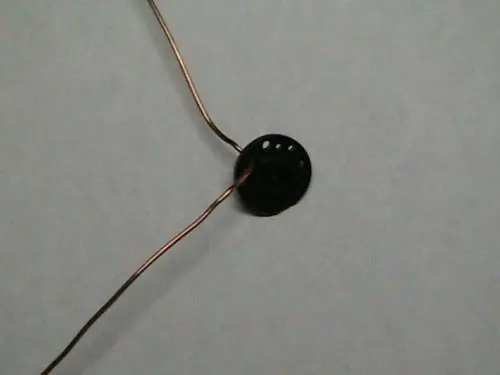
Como podéis ver tenemos un trozo de alambre de unos 25 cm de largo por 1.5mm cuadrado de sección, por cada servo se necesitan 3 tiras de esa misma medida ya que por firmeza tuve que agregarle esa cantidad ya que por el peso de este cuando esta terminado no era capaz de mantener rígidas las patas. El cabezal del servo tiene tres orificios por cada 90° y cada alambre se inserta de la manera mostrada en la siguiente foto:
Como podéis ver en la foto ya esta ensamblado en uno de los 3 orificios falta que pase por el segundo y curvar el alambre para que tenga nuestra forma deseada:
Aunque no se ve muy bien debo mencionar que el alambre pasa por los dos orificios y sale por la parte delantera del cabezal. En la siguiente foto ya se ve terminado con sus tres alambres por cabezal y envueltos con hincha aisladora para darle rigidez.
En la siguiente foto ya esta montado en el eje con una de sus dos patas terminadas, así deben quedar dos de los 3 servomotores:
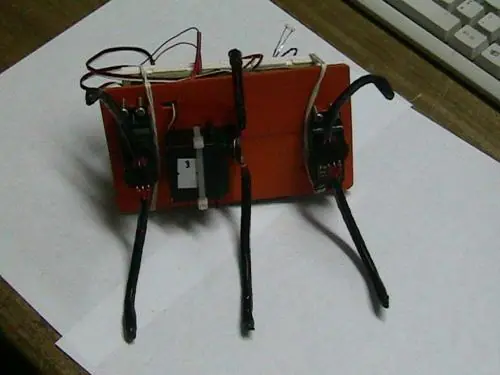
El 3° servo los alambres y posición de estos deben quedar como se muestra en la siguiente foto:
Si se fijan bien en la foto de arriba este es el servo que ira en la parte del medio y sus alambres están en otra dirección, este servo es el que se encarga de inclinar todo el cuerpo de la araña mientras los otros dos hacen que se desplace. Sin este servo no existe movimiento alguno ya que para poder avanzar hay que inclinar el peso hacia un lado para mantener el equilibrio y así poder alanzar con el otro pie, en este caso pasa algo similar, necesito inclinar el eje de equilibrio para que los dos servos restantes puedan hacer que la base completa se desplace. Como se ve en la siguiente foto ya tenemos los tres servos con sus respectivas cabezas y patas terminadas lista para ser montadas al final del proyecto cuando todo este en su sitio:
COMENZAMOS EL MONTAJE:
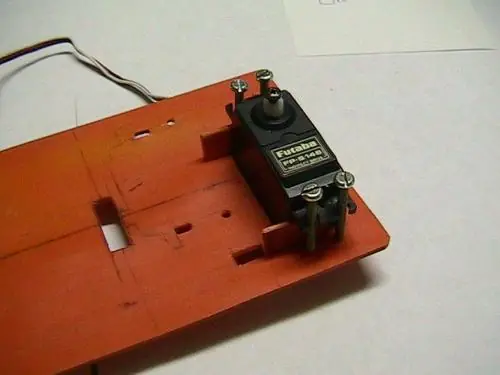
En la siguiente foto se puede ver el primer servo en su sitio con sus tornillos y soportes de plástico pequeños, fíjense que el eje de giro se encuentra en la mitad de la base marcado con una línea:
En la siguiente foto tenemos ya montado el segundo servo, que se monta de forma igual al anterior:
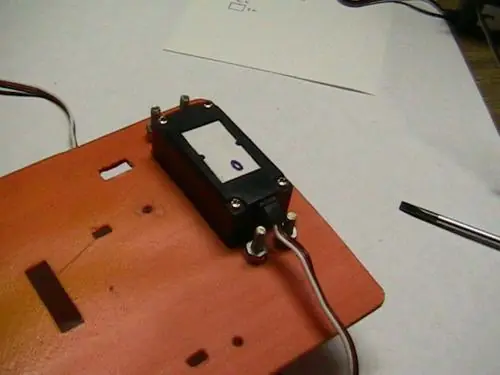
En la siguiente foto se ve la parte superior en donde esta anclado el servo con sus tuercas que mantendrán el servo en su posición:
En la siguiente foto se puede ver el 3º servo que va en forma horizontal con sus amarra cable como sujeción:
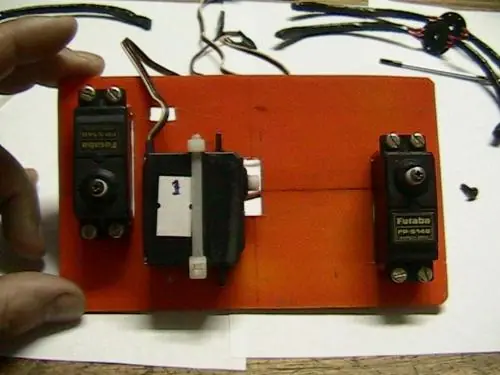
En la siguiente foto se observa con mas detalle el posicionamiento de los servos, observe que el servo que tiene el número 1 su cable de control ha sido pasado por el orificio que esta a un costado:
Aquí es importante que tengan cada servo enumerado como se puede ver en la foto de arriba, en una esquina el servo 0 en la otra el 2 y en el medio el 1 también se debe marcar el terminal de conexión del servo con el numero que corresponda, ya que esto nos servirá para entender su conexionado posterior y para el que entienda de programación sepa en el programa de movimiento que servo es el que se debe mover.
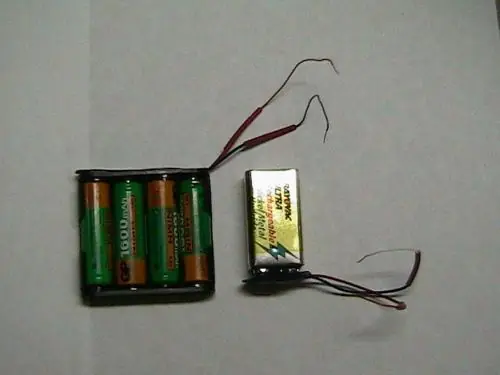
LA ALIMENTACIÓN ELÉCTRICA:
Para mover los servos usaremos 4 pilas AA de 1,5V. cada una y para la parte electrónica analógica y digital una pila de 9V. que limitaremos a 5V. con un regulador de voltaje.
Y no olvidéis comprar también un porta-pilas para 4 pilas AA y un conector para la pila de 9V, como veis en al foto superior, así podremos posicionar dichos elementos más fácilmente en nuestro robot, para sujetar la placa que contendrá el circuito yo usaré 2 gomas elásticas como podéis ver en la foto:
EL CIRCUITO:
Como podéis ver más abajo está el esquema electrónico que se encarga de verificar la fuente de luz, que en este caso usamos 3 sensores de luz para direcionar entre Izquierda, Centro y Derecha, y que son llevados al microcontrolador (16F84A) que se encargará de procesar y enviar las ordenes a los servomotores para poder hacer lo que se pretende, que es mover la araña en el sentido de la fuente de luz.
En el dibujo de arriba esta detallada cada sección de todo el conjunto, la parte Analógica que se encarga de enviar la señal al microcontrolador (Control digital) su fuente de alimentación y regulación y finalmente la parte de potencia que son los servomotores. Voy a explicar cada una de ellas para que entiendan como funciona cada parte del circuito. Comenzando con la parte analógica vemos en el costado izquierdo superior que tenemos 3 LDR’s que nos darán la posición de la fuente de luz, y son puestos en un circuito integrado que esta configurado como comprobador de voltaje y que para un LDR entendemos que: Al aplicarle luz a la foto resistencia su valor disminuye ingresando por la entrada negativa del operacional un valor que se compara por el de la resistencia variable de 1k ohm cuando este valor es igual a la salida del operacional tenemos un alto (3,3V. aproximadamente) y cuando no existe luz este valor de voltaje es diferente por el cual la salida de ese operacional es de 0 Voltios. A la salida de cada operacional se conecta diodos LED que se encargan de avisarnos el estado de las entradas y así poder verificar y ajustar con las resistencias variables de 1k ohm el valor de luz o mejor dicho la sensibilidad a la luz que queremos que funcione nuestro robot, si se encuentra encendido algún led es por que esta llegando luz de alguna fuente del ambiente, para dejarlo apagado solo se tiene que ajustar la resistencia de 1k ohm hasta que se apague. Debo mencionar que estos indicadores deben estar apagados en un comienzo para así al aplicarles luz comience a funcionar el robot según la dirección del rayo de luz. Aquí podemos sacar en conclusión que para los 3 LDR’s tenemos 8 posibles combinaciones que nos darán los diferentes estados que serán procesados por el microcrontolador, esta tabla se muestra en la siguiente imagen:
Ya sabemos que el 0 corresponde a un 0 lógico y los 3,3V. a un 1 lógico por lo que tenemos una tabla con todas las posibles combinaciones y su respectivo movimiento que llevara a cabo finalmente. En la parte de control Digital se toman estos valores y según nuestra tabla, se le enviaran las señales al servo que corresponda para hacer un movimiento en particular, y para entender que tipo de señal se le debe enviar, detallare a continuación como funciona un servomotor:
Como se muestra en la figura y como mencioné anteriormente el servo tiene una movilidad de 180° y funciona con lo que se conoce como modulación por ancho de pulsos o PWM. Osea este servo que es dE la marca FUTABA de Radiocontrol, funciona a 50Hz, o sea en un segundo le son enviados 50 pulsos, y con un simple calculo se puede dividir 1/50 y nos dará 20miliseg el ancho de pulso se utilizara para el trabajo del movimiento de este: Osea trabajando en este pequeño intervalo, podemos poner en un ángulo a nuestro antojo el servomotor y que se quede allí hasta que cambiemos ese pulso por otro. Para 0° tenemos que tener un pulso de 0,2 mili segundos y el resto un pulso bajo hasta los 20 milisegundos, esto repetidamente 50 veces nos da los 50 Hz y por consecuencia el servo en la posición 0° como se muestra en la figura. Para 90° tenemos que aplicar un pulso de 1,5 mili segundos y el resto en pulso bajo hasta los 20 milisegundos, esto repetidamente por 50 Hz nos dará la posición 90°, también mostrado en la figura. Y para 180 ° tenemos que aplicar un pulso de 2,2 mili segundos y el resto en pulso bajo hasta los 20 milisegundos, esto repetidamente por 50 Hz nos dará la posición 180°. Para este caso en particular se uso como centro 90° y se calcularon matemáticamente los pulsos para 66,5° y 112,5° que serán los 3 ángulos usados para que camine nuestra araña.
En el programa en ASM se detallan los tiempos de estos pulsos como asi las rutinas usadas para el movimiento podéis verlos en este documento de texto:
Debo mencionar que para aumentar la rapidez entre servo y servo en vez de repetir 50 veces el movimiento por servo lo disminuí a 8 y para centrarlo a 13 veces. No pretendo explicar el programa ya que seria muy largo, pero bien resumido el programa analiza los niveles lógicos de los sensores LDR que son 8 para así ejecutar una rutina de movimiento X y así poder llevar los 3 servos en una dirección X, este movimiento esta comprobado y posteriormente será puesto un video con su desempeño.
Aquí mostramos el ensamble de la parte analógica en un protoboard y que usa el circuito integrado para llevar la información de los LDR a niveles lógicos que el microcontrolador procesara a futuro, también están las LDR los Diodos LED que indicaran cuando se este alumbrando cada LDR.
Aquí se encuentra ensamblado el circuito digital de proceso con su microcontrolador y sus accesorios como la pequeña regleta de conexionado donde irán los servos conectados, y la fuente regulada que se encarga de pasar los 9 volt a los 5 volt de trabajo del Microcontrolador y que también será usado para la parte analógica


Aquí ya esta ensamblado los dos protoboard y unidas las señales de control como las fuentes tal como salían en el esquema del circuito. solo queda ponerlo sobre la base y conectar los servos como se muestra en la siguiente Figura. Un de talle importante es que la parte que tiene los sensores (LDR), debe ir sobre el servo con la numeración 0.
Aquí ya esta ensamblado casi por completo el circuito.
Solo nos queda colocar en su posición cada pata de nuestra araña (Ver siguiente Figura.).
Y ya estamos listos
Ya esta terminada nuestra araña solo queda programar el Microcontrolador con un programador para PIC y ver si responde a nuestro mandato de luz.
Espero la disfruten! Aquí tenéis un vídeo en el que se puede ver como reacciona a la luz:
link: http://www.videos-star.com/watch.php?video=6EaY60Ew
-------------------------------------------------------------------------------------------------------------------------------------------------------------
Y bueno aqui termina este mega post de robots espero que les alla gustado mucho.Luego añadire imagenes de robot.Comenten y voten
Saludos a todos