
Tercera Parte
Continuo esta tercera parte del robot a transistores. Antes de empezar repito para los recién llegados algunas palabras. Estos posts podrían llamarse "Aprendamos electrónica simple haciendo un robot" porque como pueden ver, voy muy en profundidad sobre conceptos básicos de electrónica pero en forma simple y evitando fórmulas complicadas.
Podría haber construido el robot usado microprocesadores, sensores de proximidad y un montón de componentes modernos pero se perdería el objetivo (y el desafío) que me propuse: desmistificar la electrónica. Por lo tanto encontrarán aquí largas explicaciones y muchas imágenes que he hecho con paciencia, quizás este modo de hacer sirva a algunos de ustedes que descubren este campo apasionante.
¡Buena lectura!
En este post describo el montaje mecánico del robot Calimaro, En la cuarta y última parte hablaré del cableado, y de los ajustes y las pruebas finales. Las soluciones que he adoptado tienen como objetivo mantener el proyecto lo mas simple posible, usando materiales fáciles de encontrar en las ferreterías. Lamentablemente, una de las cosas mas complicadas en los robot son las partes mecánicas relacionadas con el movimiento (ruedas, motores, etc.) porque son compuestas por elementos poco comunes. Probablemente será necesario adaptar el proyecto a los motores y ruedas que se encuentren. El resto del material es bastante común.
15. La base
Podemos usar aluminio de 1mm de espesor. Cortemos con una sierra pequeña un rectángulo de 17 cm x 15 cm. Luego, como se observa en la figura, cortemos los ángulos del rectángulo para obtener la base octogonal.
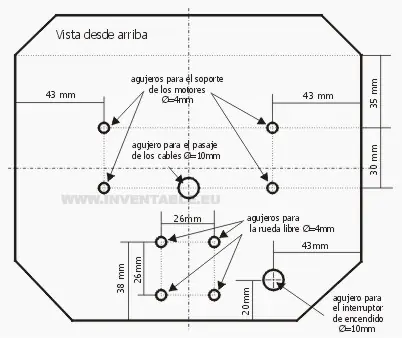
Hagamos los 8 orificios de 4mm de diámetro necesarios para fijar los motores y la rueda móvil. Hagamos también el orificio que servirá para pasar los cables (10 mm de diámetro) y para el interruptor de encendido. El diámetro de este último depende del tipo de interruptor. En mi caso es de 10mm.
Preparemos el resto de los orificios para fijar las plaquetas, la batería, los micro interruptores y la tapa del robot con una mecha (broca) de 3,5mm de diámetro.
16. Montaje de los motores y las ruedas
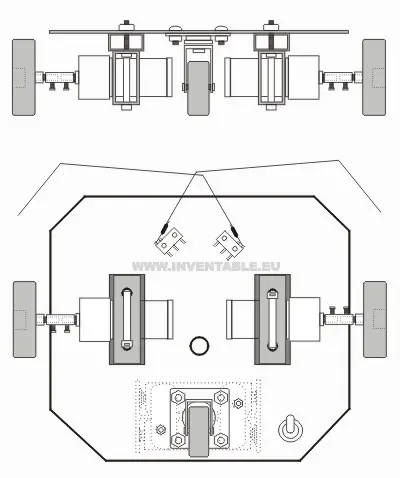
Las fotografías muestran los elementos que he usado para montar las ruedas motrices y la rueda libre de apoyo. Para los motores he construido dos bases de apoyo obtenidas de un perfil rectangular de aluminio.
Tuve que usar dos perfiles porque no encontré un perfil con las medidas necesarias. Los motores entran justos en los agujeros que he hecho. Para fijarlos bien he usado dos tiras de plástico de electricista.
Para las uniones entre los motores y las ruedas usé la parte interna de una morsetera (ver figura).
Para fijar los perfiles a la base he usado tornillos M4 (4mm). Fijar también la rueda libre con tornillos M4 mas cortos.
17. Montaje de lo sensores de colisión
Los sensores de colisiones son normales microinterruptores a los que he soldado un alambre de acero a la lengüeta como se observa en las figuras. Para soldarlos, aconsejo de sacar la lengüeta del microinterruptor, colocar el alambre previamente cortado e plegado sobre la lengueta y envolver los dos con hilo de cobre (obtenido de un cable por ejemplo).
Una vez hecho esto, soldar todo junto con un soldador bien caliente. Remontar la lengüeta con el hilo en el microinterruptor. Los microinterruptores se fijan a la base con tornillos M3 (3mm) y tuercas. En mi caso, tuve que agrandar un poco los agujeros de los microinterruptores con una mecha (broca) de 3mm porque los tornillos no pasaban.
Fin de la tercera parte
Nota: soy el autor de todo el material publicado (proyecto, textos, diseños y fotografías). Agradezco mucho vuestros comentarios
Fuente (mi blog): www.inventable.eu