Gabilina
Usuario (Italia)
El 1 de agosto del 2010 nació oficialmente Inventable con la publicación del primer artículo: "un motor hecho con un corcho". Ya algunos meses antes había empezado a publicar algo sobre la plataforma blogspot pero después de pocos tiempo retuve necesario dar a Inventable un dominio internet y un espacio propio. Pasaron ya 5 años e Inventable sigue en pié, una eternidad para los ciclos temporales de Internet donde el 99% de los blogs son abandonados antes del primer año de vida. Al principio Inventable no tenía mucha identidad, yo por ese entonces no sabía sobre que cosa escribir ni tampoco de que modo. Alternaba argumentos para especialistas como por ejemplo la serie de artículos sobre OSC con otros realmente para principiantes. La mayor parte del material publicado era el resultado de trabajos que ya había hecho antes. Por ejemplo, el robot Calimaro y el motor los había desarrollado para mis alumnos en un período que enseñé electrónica en una escuela. Después, progresivamente, empecé a hacer proyectos exclusivamente para Inventable, construyendo los prototipos y documentando en modo detallado cada cosa. Gracias a Inventable, aprendí a escribir, a gestionar un blog, a programar en Internet, a perfeccionar las técnicas de diseño y de fotografía. No obstante viva en Italia desde hace muchos años y hable italiano cotidianamente preferí usar el castellano en el blog. Esto es debido a que es mi lengua de nacimiento y por lo tanto logro dar un tono más natural y fresco a lo que escribo. Además, el castellano se habla en muchísimos países y, no menos importante, en latinoamérica existe una gran vitalidad y un gran deseo de hacer cosas que en Italia se ha perdido muchos años atrás. Al principio Inventable no lo conocía nadie. Empecé a promoverlo en Taringa (como usuario Gabilina) y en algunos foros aunque si no me gustaba para nada hacer publicidad de mi mismo. De cualquier manera, lentamente empezó a llegar más gente. Google mejoró gradualmente la posición del blog y esto trajo más gente aún. Hoy cuento con más de 700.000 visitas por año. Los comentarios me ayudaron mucho a orientar mejor el perfil de los artículos y a dar al blog la forma actual. Es necesaria mucha paciencia para responder a tantas preguntas, muchas veces las mismas que se repiten innumerables veces. Por otro lado, la opinión de los lectores y las dudas que plantean me han permitido tener una más clara percepción de lo que es necesario explicar y de lo que es importante. Aprovecho la ocasión para agradecer a la gente que me sigue y que participa activamente en Inventable. Un gran abrazo para ellos. Publicar proyectos de calidad en un blog implica un trabajo impresionante y más de una vez me he preguntado el sentido de todo esto. Quizás la respuesta es simple: lo hago simplemente porque me gusta hacerlo. Amigos de Taringa y de Inventable, gracias por vuestra presencia y por acompañarme en esta aventura. Un abrazo muy grande para todos!!! Gabriel Link a INVENTABLE
Hola gente, hoy escribo de un tema bastante...uhmmm..no se como llamarlo, digamos "terminológico". La lengua que hablamos cambia continuamente junto con nuestra sociedad. Lo mismo sucede con la terminología electrónica. Los componentes electrónicos cambian, los proyectos también pero la electricidad es siempre la misma y también sus principios, sus términos y sus fórmulas. Un clásico error en castellano es llamar "voltaje" a la tensión eléctrica (o diferencia de potencial eléctrico). Estamos tan acostumbrados que ya nos parece normal. Volt, en honor del físico italiano Alejandro Volta es la unidad de tensión (castellanizado: voltios) y no la tensión misma. Nosotros no usamos "kilaje" en lugar de peso ni tampoco "metraje" en lugar de medida. Entonces no tiene sentido hacerlo con la electricidad. Lo mismo sucede con "amperaje" en lugar de corriente y también "wattaje" en lugar de potencia. Menos mal que nos salvamos del "ohmeaje" (alguna vez alguien me lo dijo). Por el mismo motivo no es correcto construir las fórmulas usando las unidades. Por ejemplo: Amp = Volts / Ohms. en lugar de: Corriente = Tensión / Resistencia Sobre el mismo estilo algunos escriben también: Wattaje = Voltaje * Amperaje. Otra error que se comete es el de intercambiar intensidad por corriente. Es correcto decir intensidad de corriente pero no solo intensidad. El problema probablemente nace porque la palabra corriente se usa también para llamar a la electricidad en general ( "corriente eléctrica" ). "Intensidad" es el grado de fuerza de un fenómeno (intensidad de sonido, intensidad de campo, intensidad de corriente) y por lo tanto el término "intensidad" escrito solo, no es sinónimo de corriente. Hablando de curiosidades terminológicas, antiguamente se pensaba que la electricidad era un fluido y por lo tanto, el dispositivo que permitía de "condensarlo" entre sus placas lo llamaron "condensador". En los países anglosajones este nombre (en inglés “condenser”) fue reemplazado por un término mas idóneo: “capacitor”, es decir un dispositivo que tiene la “capacidad” de almacenar una carga eléctrica. No obstante la palabra justa en español sea "condensador", en los países donde se habla castellano es bien aceptado usar la palabra capacitor y yo, que soy un gran sostenedor del "castellano puro", en este caso prefiero esta última. Mas allá de cuestiones estéticas, llamar en modo incorrecto los términos usados en electricidad y electrónica crea mucha confusión. Ya no es fácil aferrar conceptos como corriente, tensión, resistencia y la relación que existe entre ellos (Ley de Ohm), imaginemos las consecuencias producidas por llamar las mismas cosas en modos distintos. Dejo abierto el tema, quizás muchos de ustedes tienen otras cosas para contar sobre este argumento. Hasta la próxima. Mi posts de electrónica y leds
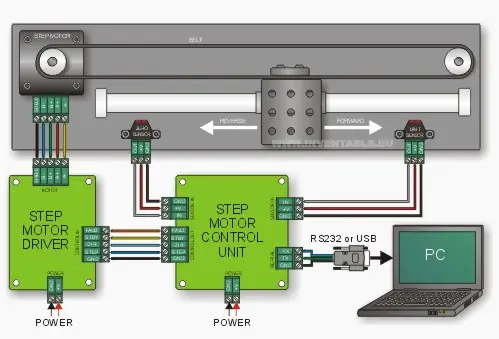
1. Introducción Este artículo describe como usar un motor paso a paso para mover una plataforma a lo largo de una guía. No obstante la extensión del artículo, el mismo es de carácter introductorio. Probablemente en futuro escribiré otros artículos que explicaran en modo mas detallado los argumentos tratados aquí. 2. Descripción del sistema En la figura inicial se puede observar el sistema que propongo como ejemplo. La parte mecánica está constituida por una base y una guía por la cual se desplaza una plataforma móvil. Esta se mueve gracias a una correa dentada y un motor paso a paso. En el ejemplo descripto no se usa una caja de desmultiplicación del motor. Por lo tanto La relación entre giros de motor y desplazamiento de la plataforma depende del diámetro de la polea del motor. Con una polea de 2 cm. de diámetro y usando un motor de 200 pasos por giro, el desplazamiento de la plataforma será de 6,28 cm. por cada giro del motor, es decir que la resolución teórica del sistema es de 0,3 mm. Mas adelante se verá que, controlando el motor en modalidad medio paso o micropaso, la resolución del sistema puede ser mucho mayor. Dos sensores ubicados en proximidad de los extremos de la guía sirven para determinar la posición absoluta de la plataforma y como dispositivos de seguridad. La electrónica está constituida por dos módulos: la unidad de potencia del motor y la unidad de control principal. Esta última recibe los comandos de posicionamiento desde un ordenador a través de un puerto serial RS232 o USB. La fotografía muestra un robot de 3 ejes para archivar casetes DV que he desarrollado algunos años atrás para aplicaciones televisivas. En primer plano se ve la plataforma móvil con la pinza que coge un casete del archivo. Para dar mayor solidez a la mecánica, las guías de movimiento horizontal son dos. En la plataforma móvil se puede observar otra sistema de guía y motor que permite de acercar la pinza al archivo. Para el movimiento de la pinza (abrir y cerrar) se optó por usar un electroimán (en la parte alta de la fotografía). 3. Contar pasos Con los motores step, contar los pasos del motor para determinar la posición es algo relativamente simple porque el mismo microprocesador que genera los impulsos eléctricos para mover el motor puede al mismo tiempo contarlos. Por lo tanto el uso de este tipo de motores elimina la exigencia de instalar particulares dispositivos que miden los giros del motor (conocidos con el nombre de “encoder”). 4. Posicionamiento relativo Para determinar la posición de la plataforma móvil, generalmente se usa un método llamado “posicionamiento relativo” que consiste en sumar o restar (según el sentido de marcha) el número de pasos efectuados por el motor a un contador o registro de posición. Esta técnica, económica y fácil de implementar necesita un procedimiento de inicialización del sistema que sirve para determinar la posición absoluta de la plataforma y que será usada como referencia para todos los movimientos sucesivos. 5. Inicialización con sensor de cero El procedimiento de inicialización consiste en determinar la posición absoluta de la plataforma. Para ello se es necesario llevar la plataforma a una posición conocida donde se encuentra un sensor llamado “de cero”. Cuando la plataforma llega a dicho punto, el contador de posición se pone a 0 y se detiene el movimiento. A partir de ese momento el sistema sabe donde se encuentra la plataforma y por lo tanto para los movimientos sucesivos se usa la técnica del “posicionamiento relativo” descripta en el párrafo anterior. Para el sensor de cero se puede usar una dispositivo infrarrojo (IR), un sensor electromagnético, capacitivo o un micronterruptor (microswitch). Este último es menos preciso respecto a los anteriores. 6. Sensor de tope En la figura anterior se puede observar otro sensor, similar al sensor de cero pero que se encuentra en el otro extremo de la guía. Este sensor, llamado “de tope” sirve solamente como protección en el caso que el motor siga girando mas allá del rango previsto. En condiciones normales de funcionamiento, este sensor nunca se activa pero en ciertas circunstancias esto puede suceder. El caso mas común es cuando el motor “pierde” pasos, o sea, cuando por diversos motivos (generalmente mecánicos), el motor no logra girar mientras el sistema de control piensa que el movimiento está sucediendo (recordemos que el sistema descripto no tiene un feedback continuo del movimiento del motor, solo en el momento de inicialización). Por lo tanto, el registro de posición tendrá un valor erróneo respecto a la ubicación real de la plataforma. Si el error es grande, puede suceder que, en un posicionamiento sucesivo, la plataforma exceda el rango de movimiento de la guía activando el sensor de tope. El sensor de tope, mas allá de proteger el sistema mecánico permite de advertir al sistema de control que el registro de posición contiene un valor erróneo. Después de la activación del sensor de tope, el sistema de control tendría que activar inmediatamente el procedimiento de inicialización para alinear correctamente el registro de posición del motor. Como en el caso del sensor de cero, para el sensor de tope se puede usar una dispositivo infrarrojo (IR) come se observa en la figura, un sensor electromagnético, capacitivo o un microswitch. 7. El sensor de cero como tope Como descripto en el caso del sensor de tope, también el sensor de cero podría servir para evitar que la plataforma vaya fuera del rango del otro lado de la guía. La única diferencia es que el procedimiento de inicialización sucesivo podría ser mas breve porque la plataforma se encuentra ya en la posición justa. Por lo tanto, en el caso que el sensor de cero detecte la plataforma en fase de un normal movimiento, la unidad de control tendrá que activar el procedimiento de inicialización como descripto en el respectivo párrafo. 8. Conexión de los sensores de cero y de tope La figura muestra la conexión de dos tipos de sensores IR simples (uno a horquilla y el otro de reflexión). La resistencia de 1K sirve para encender el led emisor. La salida de este tipo de sensor es un fototransistor. Naturalmente existen sensores de este tipo mas sofisticados con circuitos lógicos y modulación de la luz infrarroja para eliminar los disturbios. No obstante esto, generalmente los sensores ilustrados en la figura funcionan perfectamente. 9. Rampas de aceleración y desaceleración Para disminuir la solicitaciones mecánicas de cualquier sistema de movimiento motorizado, es necesario introducir rampas de aceleración y desaceleración del movimiento. En el caso de un sistema con motor paso a paso esto es imprescindible porque un arranque veloz de este tipo de motor provoca inevitablemente la pérdida de pasos. Las rampas pueden ser generadas directamente por el microprocesador de la unidad de control introduciendo retardos variables en los impulsos del motor en las fases de arranque y detención. La duración de la rampa aconsejada depende de muchos factores como por ejemplo la velocidad deseada de la plataforma y el esfuerzo (par) que el motor debe hacer para moverla. Un sistema sofisticado varía la duración de la rampa en base a la magnitud del movimiento. 10. Rampa en fase de inicialización del sistema Cuando el sistema se proyecta para su funcionamiento con rampas, el procedimiento de inicialización (o de cero) necesita una secuencia de acción mas elaborada respecto a la descripta anteriormente. Esto es debido a que la unidad de control no sabe cuando se activará el sensor de cero, por lo tanto no puede anticipar la respectiva rampa de desaceleración. La solución mas simple consiste en generar la rampa ni bien el sensor de cero se activa como se observa en la figura siguiente. El hecho está en que al final de la rampa el motor se detendrá en una posición negativa respecto al sensor de cero. Por lo tanto, inmediatamente después, es necesario mover lentamente el motor en el otro sentido hasta que la plataforma supere nuevamente el sensor de cero deteniendo el movimiento en ese punto y memorizando en el registro de posición el valor “cero”. A partir de este momento el sistema estará listo para funcionar. 11. La unidad de potencia del motor step En la figura se puede observar una típica unidad de potencia para motor paso a paso bipolar. Este tipo de motor tiene solamente 4 cables de salida conectados a los extremos de las dos bobinas internas y un quinto cable de masa. Los colores indicados son solamente a título de ejemplo porque cambian según el motor. Un error en la conexión de los cables del motor no produce ningún daño, lo único que sucede es que el motor no gira o gira mal. Muchas veces, no conociendo un motor determinado es necesario probar en distintos modos hasta encontrar la conexión justa. 12. Parámetros de la unidad de potencia Generalmente las unidades de potencia permiten de programar los parámetros de trabajo a través de dip switch o, en los modelos mas sofisticados, con la ayuda de un programa instalado en un ordenador (conectado a la unidad por medio de un cable USB o serial). Los parámetros mas importantes son: la corriente del motor (depende del tipo de motor y de la potencia necesaria) y el tipo de paso (paso entero, medio paso o fracción de paso) que permite de aumentar la resolución del eje. Otros parámetros pueden ser la corriente y el tiempo de standby. 13. Las líneas de control de la unidad de potencia Para controlar una unidad de potencia clásica generalmente sirven 4 líneas de control de las cuales dos son fundamentales: paso y dirección. Como se puede observar en la figura, en las unidades de potencia las líneas del control son generalmente fotoacopladas para mantenerlas aisladas eléctricamente al resto del sistema. Esto permite también la posibilidad de conectar una mayor variedad de dispositivos de control independientemente de los niveles lógicos de trabajo. paso: por cada impulso de esta entrada el motor se mueve de un paso o menos. Esto último es debido a que muchas unidades de potencia permiten el control del motor en otras modalidades (medio paso, un cuarto de paso o inclusive una fracción de paso) Por lo tanto cada impulso no necesariamente corresponde a un paso entero. dirección: según el nivel lógico de esta entrada el motor girará en un sentido o en el otro. standby: muchas unidades de potencia comerciales permiten a través de esta entrada de reducir la corriente del motor cuando este último no se mueve. Esto sirve para evitar que el motor y la unidad se calienten y también para ahorrar energía. Por lo general la corriente nunca se reduce a cero para mantener “frenado” el motor evitando así movimientos involuntarios del eje que introducirían errores en el registro de posición. En general el nivel de reducción de corriente se puede programar en la misma unidad de potencia. Algunas unidades de potencia, después de un intervalo de tiempo programable, reducen automáticamente la corriente cuando el motor no se mueve. En estos casos, la línea de standby no es necesaria simplificando el sistema de control y el conexionado. fault: esta es una salida de la unidad de potencia y sirve para indicar al sistema de control que la unidad tiene un desperfecto. 14. La unidad de control Es el corazón del sistema y la parte mas difícil de hacer, conseguir o adaptar a una aplicación específica. Generalmente controlada por un microprocesador, debe generar los señales de control para la unidad de potencia (incluidas las rampas de aceleración / desaceleración), leer el estado de los sensores (cero y tope), calcular la posición de la plataforma y ejecutar las órdenes provenientes del ordenador. La fotografía muestra una unidad de control que he desarrollado recientemente y que permite de ejecutar todas las operaciones descriptas. 15. Comunicación entre ordenador y unidad de control Físicamente hablando, el ordenador puede comunicar con la unidad de control a través de un puerto serial del tipo RS232 o USB. Para ello es necesario establecer un protocolo de comunicación que sea el mismo en la unidad de control como en la aplicación (el programa). Los comandos fundamentales que el protocolo tendría que disponer son: movimiento: mueve la plataforma hacia la posición pasada como parámetro stop: interrumpe inmediatamente cualquier movimiento del motor reset: reset completo de la unidad de control velocidad: programa la velocidad del motor para todos los movimientos sucesivos inicialización: activa el procedimiento de inicialización determinando así la posición absoluta de la plataforma lectura de status: el ordenador interroga la unidad de control para saber en que estado se encuentra. La unidad puede responder: posicionamiento, inicialización, stop, error etc. Espero que, no obstante la complejidad, el artículo les guste... fuente (mi blog): www.inventable.eu
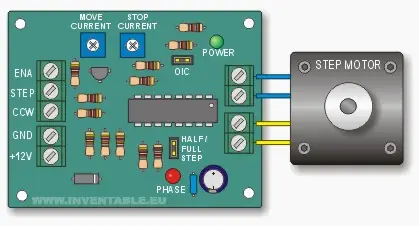
Mi artículo anterior trataba sobre la proyectación de una plataforma móvil con un motor paso a paso. Ahora describo la realización di uno de los módulos electrónicos que la componen: la unidad de potencia del motor. Existen muchísimas soluciones para construir el modulo de potencia, el modelo que yo propongo es bastante simple y fácil de hacer. No obstante ello posee ciertas características que lo distinguen respecto a otros módulos símiles como por ejemplo la posibilidad de programar la corriente del motor en movimiento y en estado de reposo. El proyecto se basa en el circuito integrado de la Motorola MC3479, un driver completo para el control de motores paso a paso bipolares que necesita muy pocos componentes adicionales para funcionar. El circuito que propongo es esencialmente el propuesto en la hojas técnicas del componente pero con algunas mejoras. La principal consiste en el sistema de control programable de la corriente del motor a través de dos trimmer. Como descripto en mi articulo anterior un driver profesional tendría que tener las entradas fotoacopladas pero esto no nos permitiría la conexión directa de un micro. Por lo tanto, en este caso propongo esta solución simple que permite de conectar cualquier plaqueta con micro sin salidas amplificadas como por ejemplo Arduino. El MC3479 regula la corriente del motor en base a la resistencia conectada entre el pin 6 y masa. Esto nos permite de disponer de una buena gama de potencias y también de poder usar el driver con motores de distintos tamaños recordando que la corriente máxima de salida del integrado es de 500mA por cada bobina. El MC3479 dispone internamente de diodos de protección para cargas inductivas por lo tanto no es necesario agregar diodos de clamp externos (como en el caso de otros CI como por ejemplo el L298). La parte del circuito que nos permite de activar y regular la corriente del motor está compuesta por la entrada “ENA” (enabled), las resistencias respectivas, el transistor BC548 y el trimmer de 100K. Para que el sistema funcione correctamente, la tarjeta que controla el driver tiene que poner a positivo la entrada “ENA” (mas de 1V) antes de mover el motor. Por otro lado, el trimmer de 470K sirve para regular la corriente del motor cuando este no se mueve manteniéndolo frenado y sin desperdiciar potencia. El MC3479 permite tres modalidades de funcionamiento: paso entero, medio paso (puente Full/Half) y medio paso a baja energía (puente OIC). En este último modo, la mitad del tiempo, una de las dos bobinas se encuentra desconectada (alta impedancia). La selección de las distintas modalidades de trabajo se realiza a través de dos puentes. Yo aconsejo de probar los tres modos. En un próximo artículo presentaré otra versión mas profesional de esta plaqueta con las entradas fotoacopladas que se puede observar en la última fotografía. También hablaré de la unidad de control El primer artículo sobre este argumento: Proyectar una plataforma móvil con un motor step fuente (mi blog): www.inventable.eu
![[Electrónica] tutorial: como conectar un relé a un circuit](https://storage.posteamelo.com/assets-adonis/assets/2014/08/02/rele4.jpg-5sUBYrmXlEi.webp)
El modo mas simple para activar un relé es con un transistor, generalmente del tipo NPN. La corriente de excitación de un relé depende del tipo de relé. Generalmente, cuando mas grande es el relé, mas corriente necesita. El otro elemento que influye es la tensión de excitación. Si consideramos relés de pequeñas dimensiones con contactos de salida en grado de conmutar corrientes de 2 o 3 Amp. la corriente de excitación necesaria no va mas allá de los 60 mA (0,06 Amp).Es bastante fácil saber la corriente de excitación porque en las hojas técnicas de los relé se indica claramente la resistencia de la bobina. Por ley de ohm:I = V / RPor ejemplo, si tenemos un relé de 5V DC con una resistencia de la bobina de 100 ohm podemos calcular la corriente:I = 5V / 100 ohm = 50 mAUna corriente de 50 mA es demasiado elevada para conectar directamente un dispositivo lógico (CMOS o TTL por ejemplo) y también para una salida de un microprocesador. Por lo tanto es necesario agregar un transistor que pueda manejar la corriente que el relé necesita. Se el transistor es del tipo NPN tenemos la ventaja de poder usar relé de cualquier tensión no obstante el circuito lógico sea de 5V, es decir, el transistor sirve también para adaptar lo niveles de tensión. Para calcular la resistencia de base hagamos un ejemplo. Supongamos de usar un BC547, este transistor tiene una ganancia estática (HFE) de 100 o mas. Por lo tanto, para obtener la corriente de salida de 50mA necesaria, la corriente de entrada debería ser:Iin = Iout / Hfe => Iin = 0,05A / 100 = 0,0005AmpPor ley de ohm:R = (V - Vb ) / I => (5V - 0,6V) / 0,0005A = 8800 ohm Para estar seguros de poder disponer de bastante corriente de salida para el relé, bajamos el valor de resistencia obtenido a la mitad o menos. La corriente de salida del dispositivo lógico que controla el transistor seguirá siendo muy baja. R = 3,3K Como podemos observar en la figura, he agregado un diodo 1N4001 conectado en paralelo con la bobina pero polarizado al contrario. Este sirve para evitar que la extra tensión de la bobina (que se genera cuando el relé se desconecta) pueda dañar el transistor. Aunque si no es necesario para el funcionamiento de relé he agregado un led indicador con su respectiva resistencia.En el caso sea necesario conectar un relé mucho mas grande y con mas consumo de corriente, conviene agregar un transistor de salida mas potente en cascada con el que ya habíamos usado creando una configuración que se llama "Darlington". Esta configuración puede ser vista como un super transistor que gana la multiplicación de las ganancias individuales. En este ultimo caso, la corriente de entrada será:Iin = Iout / (HfeT1 * HfeT2) Por lo tanto la resistencia de entrada puede ser mas grande. El circuito representado en la figura puede activar relés con corriente de la bobina máxima de 0,5Amp.Por último, si se necesita conectar muchos relés, existe una solución mas elegante que consiste en usar el circuito integrado ULN2003 que consiste en 7 grupos de transistores conectados en configuración "Darlington". El ULN2003 dispone ya de las resistencias de entrada y también del diodos de protección.Todos los textos, los diseños y las fotografías son originales.Se agradecen comentariosMi blog: www.inventable.eu
Sistema de control de un motor step con un microcontrolador Cuanto se presenta la exigencia de conectar dispositivos externos a un microcontrolador como por ejemplo sensores, a menudo se opta simplemente por la conexión directa, es decir, el cable de señal de salida del sensor a la entrada del micro. Esta no es una buena solución debido a las interferencias y a las diferencias de potencial eléctrico.Un caso común donde se presentan problemas es con Arduino, piedra filosofal de una amplia comunidad de DIYers. Desde un punto de vista electrónico, Arduino consiste simplemente en una tarjeta con a bordo un microcontrolador Atmel, un convertidor RS232 a USB y un regulador de alimentación. Las entradas y las salidas del micro se encuentran disponibles directamente en los conectores de entrada/salida (in/out) si ningún tipo de aislamiento o filtro. Por lo tanto, si se usa Arduino en instalaciones complejas, con largos cables de conexión entre dispositivos, la cosa mas probable es que el microcontrolador se bloquee frecuentemente o no funcione como es debido. La tarjeta de control Arduino Sinking (NPN) y Sourcing (PNP)Una de las nociones menos consideradas cuando se trabaja en la conexión de sistemas electrónicos es el concepto de “Sinking and Sourcing” o, mas conocido como NPN y PNP. Sinking (NPN) y Sourcing (PNP) son términos que definen el tipo de conexión digital entre unidades de control cuando se trabaja en corriente continua (DC) independientemente del tipo de dispositivo usado para la conexión (relé, transistor, etc.).En la primer figura podemos observar una conexión del tipo Sinking o NPN en la cual la salida del dispositivo se conecta a masa cuando es activa, es decir cuando el transistor conduce. En este caso, la carga del dispositivo receptor se encuentra conectada a positivo para permitir un pasaje de corriente. En la segunda figura se encuentra representada una conexión del tipo Sourcing o PNP en la cual el transistor de salida está conectado al positivo mientras que la carga del dispositivo receptor está conectada a masa.Observen que en el primer caso (Sinking) el transistor es del tipo NPN mientras que en el segundo (Sourcing) el transistor es del tipo PNP. Este es el motivo por el cual las dos configuraciones se llaman también NPN y PNP. Generalmente los dispositivos industriales disponen salidas de un tipo o del otro.Fotoacopladores Un fotoacoplador es un dispositivo compuesto por un fotoemisor como (por ejemplo un led) y un fotoreceptor encapsulados en un único chip. El fotoacoplador permite pasar un señal lógico a través de un “puente” luminoso y sin contacto eléctrico entre entrada y salida. Existen muchos tipos de fotoacopladores pero los mas comunes están constituidos simplemente por un led y un fototransistor come se observa en la figura. Cuando el led se enciende, el transistor pasa al estado de saturación.En la figura siguiente se puede observar el uso de un fotoacoplador para aislar la entrada de un microcontrolador. En estado de reposo, el interruptor está abierto y el led del fotoacoplador está apagado mientras el transistor, no recibiendo luz se encuentra en estado de corte. La entrada del micro se encuentra a nivel alto gracias a la resistencia de pull-up R2. Cuando se cierra el interruptor, empieza a pasar corriente por el led del fotoacoplador que se enciende, el transistor del fotoacoplador recibe la luz del led y pasa al estado de conducción llevando la entrada del micro a masa (estado bajo).Se puede ver que los dos circuitos (el del led y el del micro) se encuentran alimentados por dos fuentes distintas (V1 y V2) y están completamente separados eléctricamente. Dadas las características del led (conduce en un solo sentido), este tipo de conexión se realiza solamente con entradas digitales con polaridad única. En el caso de corriente alternada o niveles de tensión analógicos, existen otras soluciones que no trataremos en este artículo.Uso de fotoacopladores para la conexión Sourcing o PNPAhora veremos un ejemplo práctico de proyectación en el cual conectaremos un sensor con salida PNP a una tarjeta con microcontrolador con entrada fotoacoplada. Como se puede observar en la figura, tenemos el sensor con salida PNP a la izquierda mientras que la tarjeta con microcontrolador está a la derecha. La conexión se efectúa con dos cables, el primero es la salida del transistor mientras el segundo es la masa del sensor. Para mantener perfectamente aislado el microcontrolador, las alimentaciones y las masas deben ser distintas.Para calcular los valores de las resistencias podemos usar la hoja técnica del fotoacoplador. Con 12V para el sensor y la entrada del opto y 5V para el micro los siguientes valores funcionan bien: R1 = 2K2R2 = 4K7 Para los interesados en este argumento los invisto a leer una versión mas detallada de este artículo en:Fuente (mi blog): www.inventable.eu Soy el autor del artículo. (Gabilina).
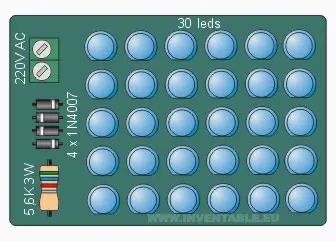
Para los corajudos taringueros aquí va mi segunda propuesta, ya no un led sino "muchos". Este proyecto es útil por ejemplo para aplicaciones de iluminación. El ejemplo que propongo es el de 30 leds blancos conectados en serie. Cambiando solamente el valor de la resistencia podemos poner mas o menos leds. Una cosa curiosa es que si aumentamos la cantidad de leds conectados al circuito, este consume lo mismo, porque el aumento de potencia en los leds agregados se compensa con la disminución de la potencia disipada por la resistencia. Por lo tanto, mas leds conectados, mas eficiente es el circuito. Como nuestro objetivo es usar los leds para iluminar, nos conviene que estos se enciendan en los dos semiciclos, por lo tanto es necesario rectificar la tensión de red a través de un puente rectificador de diodos. Podemos usar uno ya hecho o construirlo nosotros con 4 diodos rectificadores comunes (tipo 1N4007 o equivalentes). A diferencia de mi artículo precedente (que usaba un solo led) en este caso, la caída de tensión en los leds es muy importante para el cálculo del valor de la resistencia. Y como la caída de tensión en los leds depende del tipo usado, es necesario primero elegir el tipo de led y después obtener el valor de tensión del mismo a través de las hojas técnica del fabricante o midiéndolo directamente como explicado en mi artículo “como medir la tensión de un led“. En nuestro ejemplo tenemos 30 leds blancos de 3,6V de caída en cada uno. Para obtener una buena luz optamos por una corriente aproximada de 20mA. La formula resultante será: R = (Vac - (Vled * NumLeds)) / I R = (220V - (3,6V * 30)) / 20mA R= 5.600 ohm (5,6K) Como la caída de tensión en los diodos rectificadores es muy baja respecto a la de los leds, podemos no considerarla para simplificar la formula. Ahora calculamos la potencia de la resistencia: P = I * I * R P = 20mA * 20mA * 5.600 ohm P = 2,24 Watt Podemos observar que la potencia disipada en la resistencia es elevada y por lo tanto, esta debe ser de por lo menos 3 Watt para estar tranquilos. Lógicamente, existe un límite en la cantidad de led en serie que podemos conectar. En al caso del los led blancos de nuestro ejemplo es aproximadamente de 50 leds. Si conectáramos muchos mas, la suma de la tensiones de cada led superarían la tensión de red y los leds no se encenderían. Por otro lado se presenta un problema cuando los leds son numerosos y es que la tolerancia en la caída de tensión de los led crea un error acumulativo en la fórmula y la corriente real del circuito podría ser distinta de la calculada. Si tenemos necesidad de conectar muchos led (mas de 30) aconsejo de conectar un valor de resistencia mas elevado respecto al calculado, medir con un tester la tensión en la resistencia para verificar que la corriente real sea como la calculada usando la fórmula: Ires = Vres / Res In base al resultado podemos bajar o subir el valore de resistencia para obtener la corriente deseada. ¡Atención!: trabajar directamente con 220V es muy peligroso. No tocar ninguna parte del circuito cuando este se encuentra conectado a la red eléctrica. Construyan el circuito con cuidado y prolijidad, sobre una buena base (de islas por ejemplo o mucho mejor con circuito impreso) y verificando bien todas las soldaduras. No aconsejo trabajar directamente con 220V a personas sin experiencia en electrónica. Vean mi post sobre como conectar un led a 220V: LED con 220V Nota final: Como pueden observar, mis artículos tienen como objetivo ilustrar conceptos esenciales de electrónica con ejemplos prácticos y simples. Por ese motivo trato de explicar detalladamente todo ayudándome muchas veces con fórmulas simples y útiles (como la ley de Ohm). Existen muchos proyectos de circuitos en el web que hacen lo que yo propongo con características mejores de los míos pero generalmente, estos artículos no enseñan nada a la gente que quiere aprender algo de electrónica. Mi objetivo es difundir el conocimiento aprovechando este extraordinario medio que es el web. ¡¡Hasta la próxima!! Fuente (mi blog): www.inventable.eu
Los leds son un invento extraordinario, y más aún cuando, gracias al descubrimiento de nuevos materiales para su realización, se logró construir los leds azules, los blancos y toda la nueva gama de alta luminosidad, ideales en un nuevo campo de aplicación: la iluminación. Como consecuencia de esto, todo el mundo desea usarlos. El problema es que, mas allá de su extraordinaria difusión, los leds no dejan de ser componentes electrónicos bastante delicados si no usados correctamente. Este artículo nos explica como medir la tensión característica de un led sin el riesgo de romperlo, para poder calcular sucesivamente la resistencia necesaria para su funcionamiento. La tensión característica de un led depende del tipo y del modelo y puede variar entre 1,2V y 4,5V. Aclaro que la tensión característica de un led no es un valor absoluto porque varía un poco según la corriente que hacemos pasar por él (como sucede también con los diodos normales). Por ejemplo, un led blanco con tensión característica de 3,6V puede bajar hasta 3,4V o aún más si la corriente es elevada. De cualquier manera, podemos observar que esta variación no es muy grande y por lo tanto podemos ignorarla cuando hacemos los cálculos de la resistencia. Para poder medir le tensión característica de un led necesitamos: - el led que queremos medir - un tester (analógico o digital) - una fuente de alimentación (de 6V o 9V) o una batería de 9V - una resistencia de 1000 ohm En primer lugar debemos identificar cual es el ánodo (positivo) y el cátodo (negativo) del led, esto es importante porque con una tensión elevada, un led conectado al contrario puede romperse. En las hojas técnicas del led (datasheet) el valor de tensión inversa máxima se llama “max. reverse voltage” y podemos observar que en muchos modelos es realmente bajo. Yo poseo muchos led de alta luminosidad con una tensión inversa máxima de 5V. Esto quiere decir que si conectamos una pila de 9V a un led polarizada al contrario, probablemente el led se romperá porque se superaría la tensión inversa máxima de 5V. Por lo tanto, aconsejo de cuidar este aspecto. Existen dos signos bastante claros para identificar el cátodo (negativo) de los led que son: la pata negativa es mas corta y en segundo lugar, en el cuerpo del led el negativo tiene una marca derecha (ver figura). Para medir la tensión característica de un led, conectemos provisoriamente la resistencia de 1000 ohms (1K) al ánodo del led mientras el cátodo lo conectamos al negativo del alimentador (o batería). Por último conectamos el terminal libre de la resistencia al positivo del alimentador (o batería). El led debería encenderse. Por último, colocando el selector del tester en la posición VDC medimos con él la tensión sobre el led. El valor de 1000 ohm con una alimentación de 6V o 9V nos garantiza que la corriente que pasará por el led no será nunca excesiva no importa el modelo que usemos. Por ejemplo, en el peor caso, con un led rojo de 1,2V de tensión y una alimentación de 9V pasará una corriente de: I = (V-Vled) / R => I = (9V-1,2V) / 1000 = 7,8 mA que es bastante baja para cualquier tipo de led. En el pasado, disponer de las hojas técnicas de un componente electrónico era un privilegio reservado a pocos técnicos mientras que hoy, gracias a Internet, en pocos segundos podemos encontrarlas y consultarlas directamente online. Por eso, si conocemos la sigla del led que queremos usar, aconsejo de mirar la información técnica, especialmente la corriente máxima que el led soporta y la tensión característica. Con estos dos datos podemos calcular sin problemas la resistencia necesaria. Después de obtener la tensión característica del led que queremos usar, podemos calcular el valor de resistencia con la siguiente formula: R = (V-Vled) / I Una ultima cosa, aunque si los led no se queman como las lamparitas con filamento, su rendimiento decae con el tiempo. Un led que funciona en condiciones límites (corriente y variaciones de temperatura excesivas, etc.) envejecerá mucho mas rápidamente que un led “relajado”. Vean mi post sobre como conectar un LED a 220V: LED con 220V Vean también: 30 LED con 220V Y por último: LED mu facil Fuente (mi blog): www.inventable.eu

Tercera Parte Continuo esta tercera parte del robot a transistores. Antes de empezar repito para los recién llegados algunas palabras. Estos posts podrían llamarse "Aprendamos electrónica simple haciendo un robot" porque como pueden ver, voy muy en profundidad sobre conceptos básicos de electrónica pero en forma simple y evitando fórmulas complicadas. Podría haber construido el robot usado microprocesadores, sensores de proximidad y un montón de componentes modernos pero se perdería el objetivo (y el desafío) que me propuse: desmistificar la electrónica. Por lo tanto encontrarán aquí largas explicaciones y muchas imágenes que he hecho con paciencia, quizás este modo de hacer sirva a algunos de ustedes que descubren este campo apasionante. ¡Buena lectura! En este post describo el montaje mecánico del robot Calimaro, En la cuarta y última parte hablaré del cableado, y de los ajustes y las pruebas finales. Las soluciones que he adoptado tienen como objetivo mantener el proyecto lo mas simple posible, usando materiales fáciles de encontrar en las ferreterías. Lamentablemente, una de las cosas mas complicadas en los robot son las partes mecánicas relacionadas con el movimiento (ruedas, motores, etc.) porque son compuestas por elementos poco comunes. Probablemente será necesario adaptar el proyecto a los motores y ruedas que se encuentren. El resto del material es bastante común. 15. La base Podemos usar aluminio de 1mm de espesor. Cortemos con una sierra pequeña un rectángulo de 17 cm x 15 cm. Luego, como se observa en la figura, cortemos los ángulos del rectángulo para obtener la base octogonal. Hagamos los 8 orificios de 4mm de diámetro necesarios para fijar los motores y la rueda móvil. Hagamos también el orificio que servirá para pasar los cables (10 mm de diámetro) y para el interruptor de encendido. El diámetro de este último depende del tipo de interruptor. En mi caso es de 10mm. Preparemos el resto de los orificios para fijar las plaquetas, la batería, los micro interruptores y la tapa del robot con una mecha (broca) de 3,5mm de diámetro. 16. Montaje de los motores y las ruedas Las fotografías muestran los elementos que he usado para montar las ruedas motrices y la rueda libre de apoyo. Para los motores he construido dos bases de apoyo obtenidas de un perfil rectangular de aluminio. Tuve que usar dos perfiles porque no encontré un perfil con las medidas necesarias. Los motores entran justos en los agujeros que he hecho. Para fijarlos bien he usado dos tiras de plástico de electricista. Para las uniones entre los motores y las ruedas usé la parte interna de una morsetera (ver figura). Para fijar los perfiles a la base he usado tornillos M4 (4mm). Fijar también la rueda libre con tornillos M4 mas cortos. 17. Montaje de lo sensores de colisión Los sensores de colisiones son normales microinterruptores a los que he soldado un alambre de acero a la lengüeta como se observa en las figuras. Para soldarlos, aconsejo de sacar la lengüeta del microinterruptor, colocar el alambre previamente cortado e plegado sobre la lengueta y envolver los dos con hilo de cobre (obtenido de un cable por ejemplo). Una vez hecho esto, soldar todo junto con un soldador bien caliente. Remontar la lengüeta con el hilo en el microinterruptor. Los microinterruptores se fijan a la base con tornillos M3 (3mm) y tuercas. En mi caso, tuve que agrandar un poco los agujeros de los microinterruptores con una mecha (broca) de 3mm porque los tornillos no pasaban. Fin de la tercera parte Robot a transistores Primer Parte Robot a transistores Segunda Parte Robot a transistores Cuarta Parte Nota: soy el autor de todo el material publicado (proyecto, textos, diseños y fotografías). Agradezco mucho vuestros comentarios Fuente (mi blog): www.inventable.eu
Primer Parte 1. Introducción El robot que describo se inspira en los primeros robots construidos al final del los años 40. Se podría definir un robot digital pero no como estamos acostumbrados a verlos en nuestros días porque los circuitos electrónicos de Calimaro están constituidos solamente por transistores y componentes discretos. El objetivo de esta elección es de carácter didáctico, un modo de poder “tocar” con las manos las distintas partes del sistema desmistificando el dogma de la electrónica moderna. 2. El dogma de simplicidad El dogma de simplicidad de Calimaro se puede resumir en los siguientes puntos: Parece difícil obtener un mínimo de inteligencia del robot sin usar circuitos integrados o microprocesadores. Sin embargo, analizando los proyectos de los viejos robot descubrimos que sistemas muy simples pero al mismo tiempo ingeniosos, lograban comportamientos sofisticados. Uno de los casos mas interesantes es el de Grey Walter y sus tortugas cibernéticas. 3. Las tortugas de Grey Walter Grey Walter había usado para sus tortugas dos válvulas (equivalentes a dos transistores) y dos relé. Por otro lado los robot de Walter no eran muy fáciles de construir debido al hecho que la parte mecánica compensaba la electrónica espartana. Las tortugas tenían un sistema de tracción compuesto por una sola rueda que servía también para la dirección. Una fotocélula montada sobre el eje de dirección se movía junto con la rueda. Sin embargo, dos objetivos funcionales me alejaban levemente del minimalismo de Walter: por un lado la necesidad de simplificar la parte mecánica y por otro lado obtener un consumo eléctrico muy bajo. 4. Movimiento Respecto a la mecánica, la solución mejor era adoptar un sistema motriz clásico en los robot modernos o sea: dos ruedas motrices independientes y una rueda libre que sirve solo como apoyo completando el trípode. Esta configuración, mas allá de la simplicidad, posee grandes cualidades que observaremos a lo largo del artículo. La base de Calimaro es un octógono irregular que permite de ubicar las ruedas motrices centrales mas adelante en modo tal de dar estabilidad a la estructura con tres punto de apoyo. Los motores pueden girar en los dos sentidos porque son controlados por puentes de transistores. En la siguiente tabla podemos observar la trayectoria del robot en base al movimiento de los motores: 5. Los puentes de los motores Un poco de teoría. Un motor de corriente continua gira en un sentido o en el otro según como está polarizado. Esta característica es muy útil para controlar el movimiento del robot. Un modo simple para controlar un motor en ambos sentidos de marcha consiste en conectarlo a un conmutador doble como se observa en la figura siguiente. En lugar de un conmutador se pueden usar simples interruptores como se observa en la figura. En este caso la conmutación es mas complicada y es necesario evitar que dos interruptores de la misma columna hagan contacto porque se produciría un cortocircuito. La configuración descripta se llama “puente” y como veremos, los interruptores pueden ser remplazados por transistores comunes. Estos transistores serán de dos tipos: NPN y PNP. El problema que encontramos es como conectar los transistores para que el puente funcione. Sabemos que los transistores PNP conducen cuando la tensión de la base es negativa mientras que los NPN conducen cuando la tensión de la base es positiva. Para que el puente funcione, necesitamos poner en conducción los transistores que se encuentran en “diagonal” el PNP de la izquierda con el NPN de la derecha o viceversa. Para obtener esto podemos agregar otro dos transistores de entrada del tipo NPN conectados como se observa en la figura. Para no complicar excesivamente la electrónica, el circuito no dispone de una protección en el caso que las dos entradas fueran activas. Si esto sucediera, el puente entraría en cortocircuito. Es necesario que la electrónica que controla el puente no entre en esta condición. Las siguientes fotografías muestran el puente de control montado sobre una plaqueta universal con islas de cobre separadas 5mm entre si. Para la construcción del robot tenemos que hacer dos de estos puentes. En la segunda parte explicaré como hacer los circuitos de control del robot. Hasta la próxima Fin de la primer parte Robot a transistores Segunda Parte Robot a transistores Tercera Parte Robot a transistores Cuarta Parte También pueden ver: Unidad de control para motores step, Proyectar una plataforma móvil con un motor step Nota: soy el autor de todo el material publicado (proyecto, textos, diseños y fotografías). Agradezco mucho vuestros comentarios Fuente (mi blog): www.inventable.eu