BIENVENIDOS

Mecánica y control de robots manipuladores (parte 1)
En esta entrega sobre robótica industrial, veremos los elementos y terminología utilizada para describir el comportamiento de robots manipuladores. Si te perdiste la introducción al tema, puedes hacer click para acceder al post

Descripción de posición y orientación
Al estudiar robótica industrial, generalmente existe la necesidad de conocer la ubicación de los objetos en el espacio tridimensional. Dichos objetos constituyen las partes del manipulador, las piezas y herramientas con las que trabaja y otros objetos que pudiesen existir en su entorno.
A un nivel básico, podemos decir que la descripción de los objetos queda determinada por su posición y orientación.
A un nivel básico, podemos decir que la descripción de los objetos queda determinada por su posición y orientación.
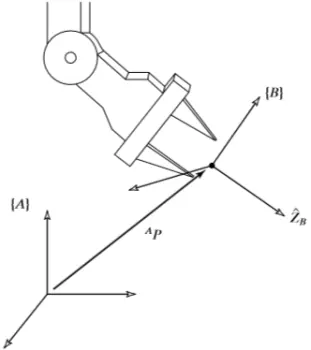
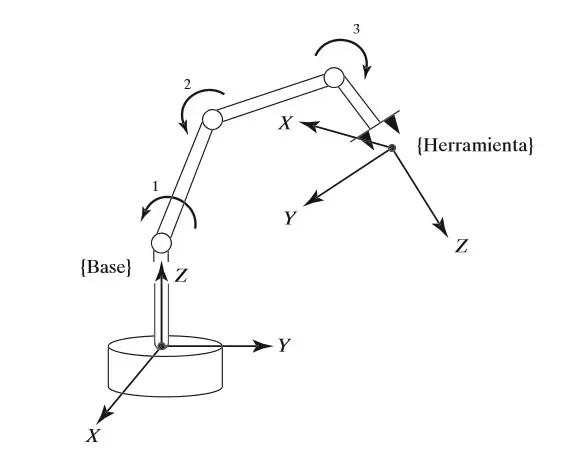
Para describir la posición y orientación de un robot manipulador, es necesario adjuntar un sistema de coordenadas (trama) al objeto. Después, se describe la posición y orientación de esa trama con respecto a un sistema de coordenadas referenciales (ver imagen abajo).
Cinemática directa de robots manipuladores
Se podría decir que la cinemática es la ciencia que trata el movimiento sin considerar las fuerzas que lo ocasionan. Dentro de este ámbito se estudian la posición, velocidad, aceleración y todas las derivadas de mayor orden en las variables de posición (no solamente respecto al tiempo, puede ser respecto a cualquier otra variable)
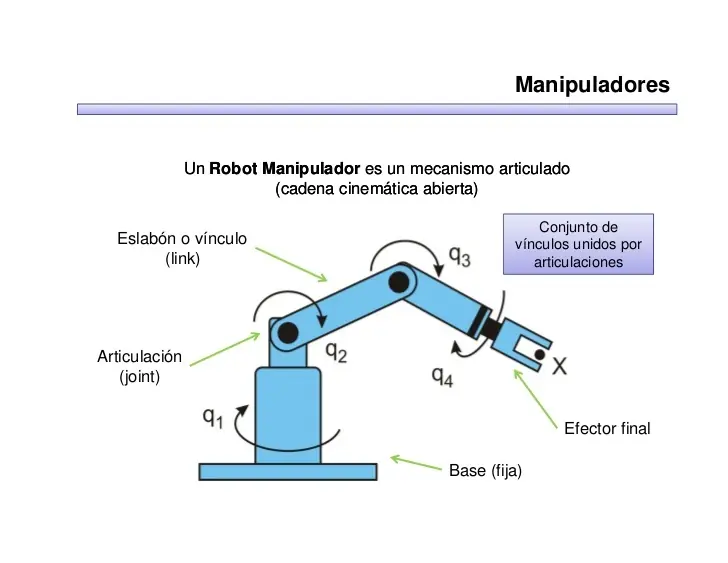
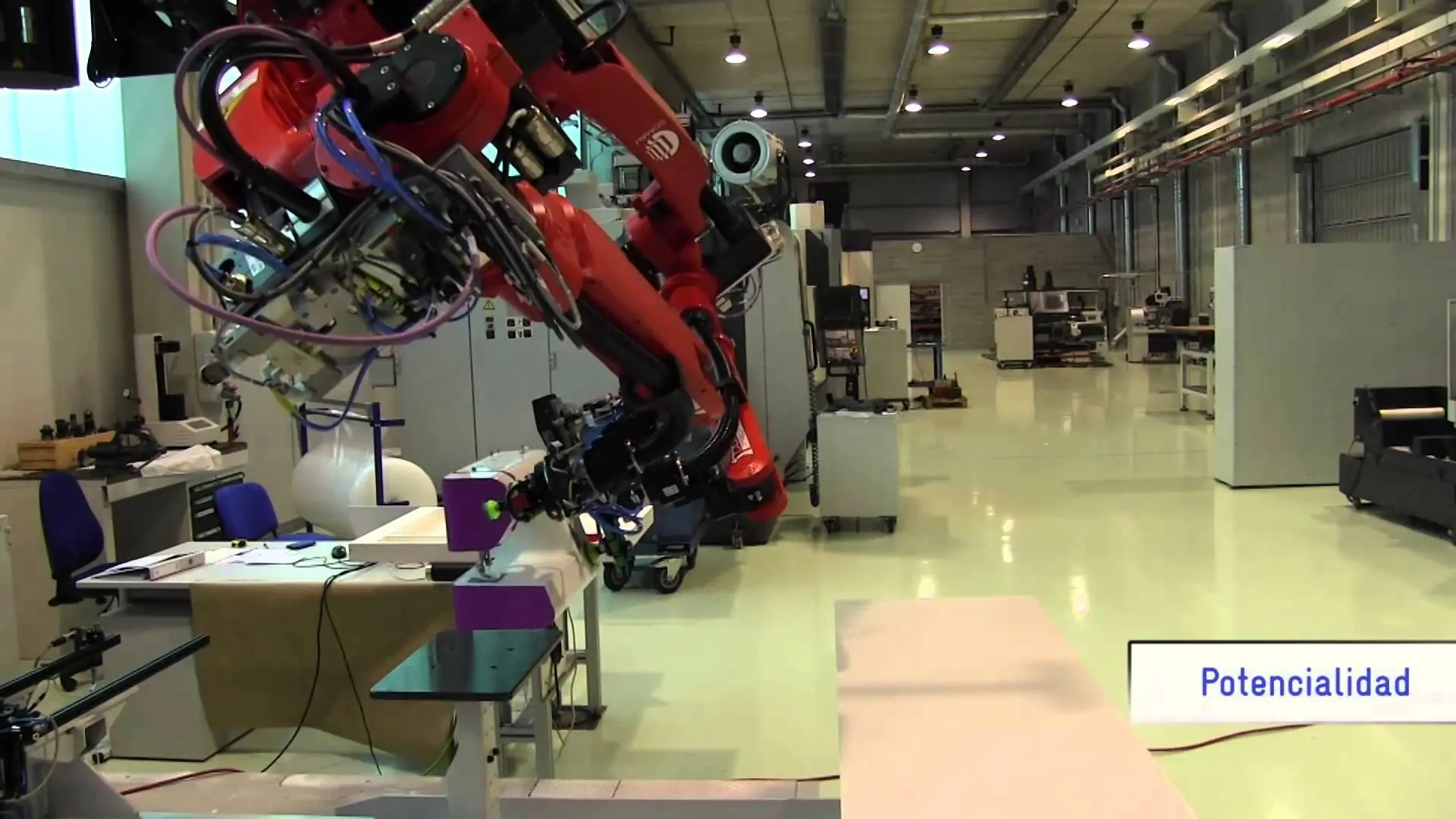
Un manipulador consiste en vínculos casi rígidos, los cuales están conectados por articulaciones que permiten el movimiento relativo de los vínculos adyacentes.
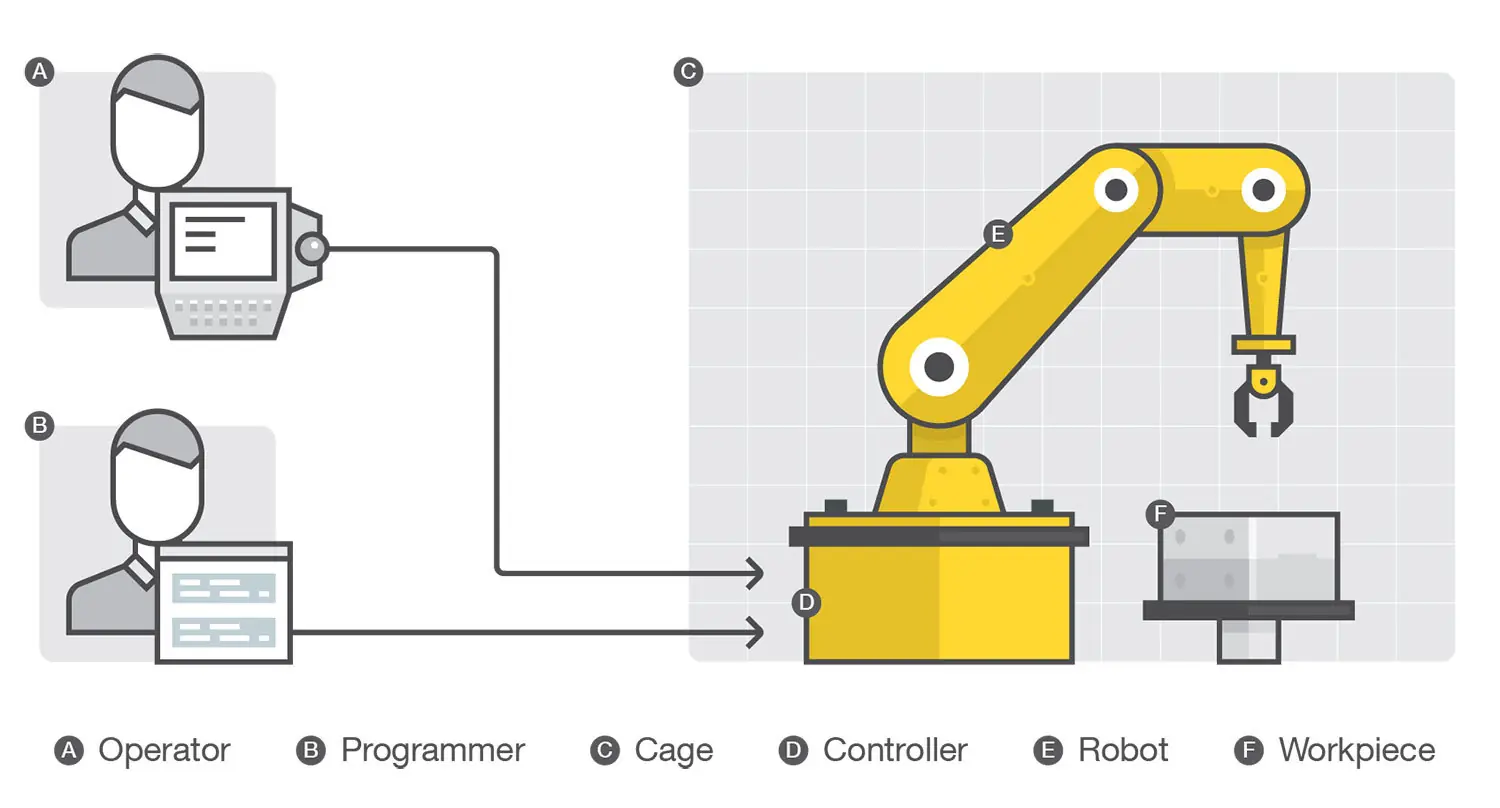
Estas articulaciones generalmente se instrumentan con sensores para medir la posición relativa con respecto a otros vínculos. En caso de las articulaciones giratorias o angulares, los desplazamientos se conocen como ángulos articulados. Además, algunos manipuladores tienen articulaciones deslizantes o prismáticas, en las que el desplazamiento relativo entre los vínculos es una traslación llamada desplazamiento de articulación.
Si quieren conocer un poco más sobre el movimiento de cada tipo de robot manipulador, pueden visitar un post que hice al respecto .
Estas articulaciones generalmente se instrumentan con sensores para medir la posición relativa con respecto a otros vínculos. En caso de las articulaciones giratorias o angulares, los desplazamientos se conocen como ángulos articulados. Además, algunos manipuladores tienen articulaciones deslizantes o prismáticas, en las que el desplazamiento relativo entre los vínculos es una traslación llamada desplazamiento de articulación.
Si quieren conocer un poco más sobre el movimiento de cada tipo de robot manipulador, pueden visitar un post que hice al respecto .
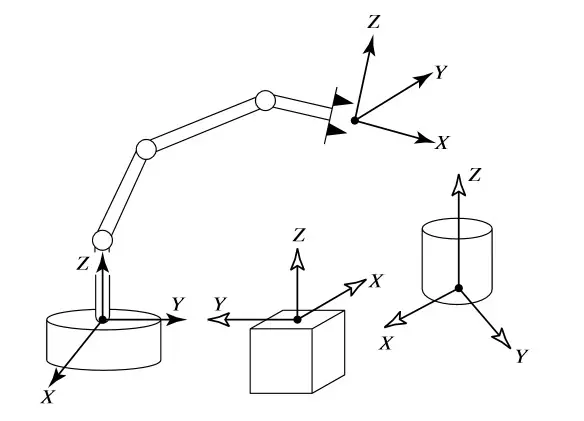
En el extremo libre de la cadena de vínculos que constituyen el manipulador se encuentra el efector final. Dependiendo de la aplicación que se va a dar al robot, el efector podría ser una pinza, un soplete para soldadura, un electroimán, entre otros.
Generalmente se presenta la posición del manipulador dando una descripción de la trama de la herramienta, la cual está unida al efector final, relativa a la trama base que está unida a la base fija del robot.
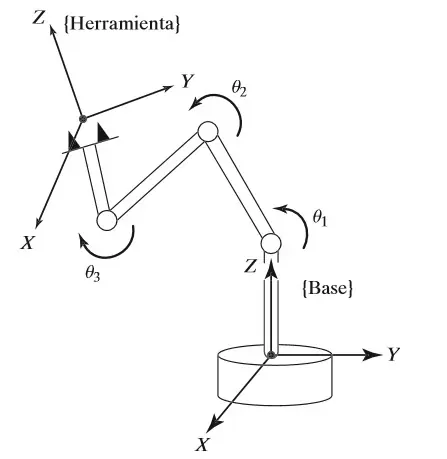
Un problema muy básico en el estudio de mecánica de manipuladores recibe el nombre de cinemática directa, que es el problema geométrico estático de calcular la posición del efector final del manipulador, dado un conjunto de ángulos articulares.
El problema consiste en calcular la posición y orientación de la trama de la herramienta, relativa a la trama base. Esto requiere cierta capacidad espacial y aptitud matemática, pero no es nada del otro mundo. Lo voy a postear a medida que sigamos entrando en materia.
El problema consiste en calcular la posición y orientación de la trama de la herramienta, relativa a la trama base. Esto requiere cierta capacidad espacial y aptitud matemática, pero no es nada del otro mundo. Lo voy a postear a medida que sigamos entrando en materia.
Cinemática inversa de robots manipuladores
Este es otro tema que pienso detallar mejor a futuro, pero se plantea de la siguiente manera: dada la posición y orientación del efector final del manipulador,
calcule todos los conjuntos posibles de ángulos articulares que podrían utilizarse para obtener esta posición y orientación dadas.
calcule todos los conjuntos posibles de ángulos articulares que podrían utilizarse para obtener esta posición y orientación dadas.
Este es un problema geométrico un poco más complicado,
que se resuelve miles de veces de forma rutinaria en el sistema humano y otros sistemas biológicos. Sin embargo, en el caso de un sistema artificial como un robot, es necesario crear un algoritmo en la computadora de control que pueda realizar este cálculo. Incluso en algunos casos, la solución de este problema suele considerarse la parte fundamental del sistema manipulador.
que se resuelve miles de veces de forma rutinaria en el sistema humano y otros sistemas biológicos. Sin embargo, en el caso de un sistema artificial como un robot, es necesario crear un algoritmo en la computadora de control que pueda realizar este cálculo. Incluso en algunos casos, la solución de este problema suele considerarse la parte fundamental del sistema manipulador.
Algunos de los primeros robots carecían de este algoritmo; simplemente se desplazaban (algunas veces incluso manualmente) hacia las ubicaciones deseadas, que después se registraban como un conjunto de valores de articulación para su posterior reproducción. Actualmente es raro encontrar un robot industrial que carezca de un algoritmo básico de cinemática inversa.
El estudio de estas cuestiones hace que apreciemos lo que la mente humana y el sistema nervioso logran realizar cuando (al parecer de forma inconsciente) movemos y manipulamos objetos con nuestras manos. Quién diría que en ciertas cosas estamos tan "bien programados".
Continuaré con el tema en las próximas entregas.
Continuaré con el tema en las próximas entregas.

Si están interesados en aprender sobre temas similares,
visiten mi contenido haciendo click en la imagen de abajo.
visiten mi contenido haciendo click en la imagen de abajo.




